7 Простейшие движения твердого тела
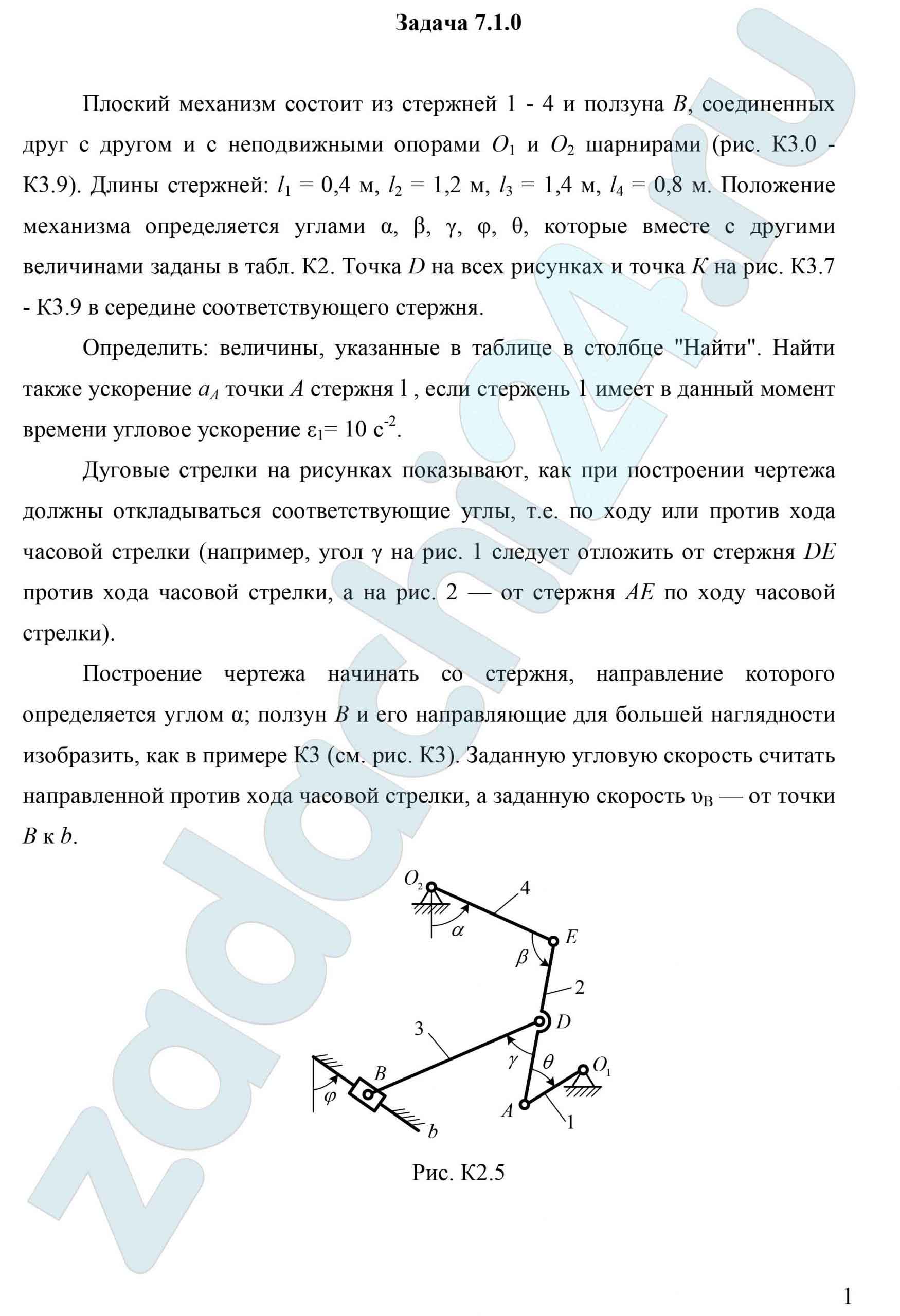
7.1 Плоский механизм состоит из стержней 1 — 4 и ползуна В, соединенных друг с другом и с неподвижными опорами О1 и О2 шарнирами (рис. К3.0 — К3.9). Длины стержней: l1 = 0,4 м, l2 = 1,2 м, l3 = 1,4 м, l4 = 0,8 м. Положение механизма определяется углами α, β, γ, φ, θ, которые вместе с другими величинами заданы в табл. К2. Точка D на всех рисунках и точка К на рис. К3.7 — К3.9 в середине соответствующего стержня.
Определить: величины, указанные в таблице в столбце «Найти». Найти также ускорение aA точки А стержня l , если стержень 1 имеет в данный момент времени угловое ускорение ε1= 10 с-2.
Дуговые стрелки на рисунках показывают, как при построении чертежа должны откладываться соответствующие углы, т.е. по ходу или против хода часовой стрелки (например, угол γ на рис. 1 следует отложить от стержня DE против хода часовой стрелки, а на рис. 2 — от стержня АЕ по ходу часовой стрелки).
Построение чертежа начинать со стержня, направление которого определяется углом α; ползун В и его направляющие для большей наглядности изобразить, как в примере К3 (см. рис. К3). Заданную угловую скорость считать направленной против хода часовой стрелки, а заданную скорость υB — от точки В к b.
Таблица К2
| Номер условия | Углы | Дано | Найти | ||||
| αº | βº | γº | φº | θº | ω1, 1/с | ||
| 6 | 30 | 120 | 30 | 0 | 60 | 5 | VB, VE, ω3 |



7.2 Кинематический анализ многозвенного механизма
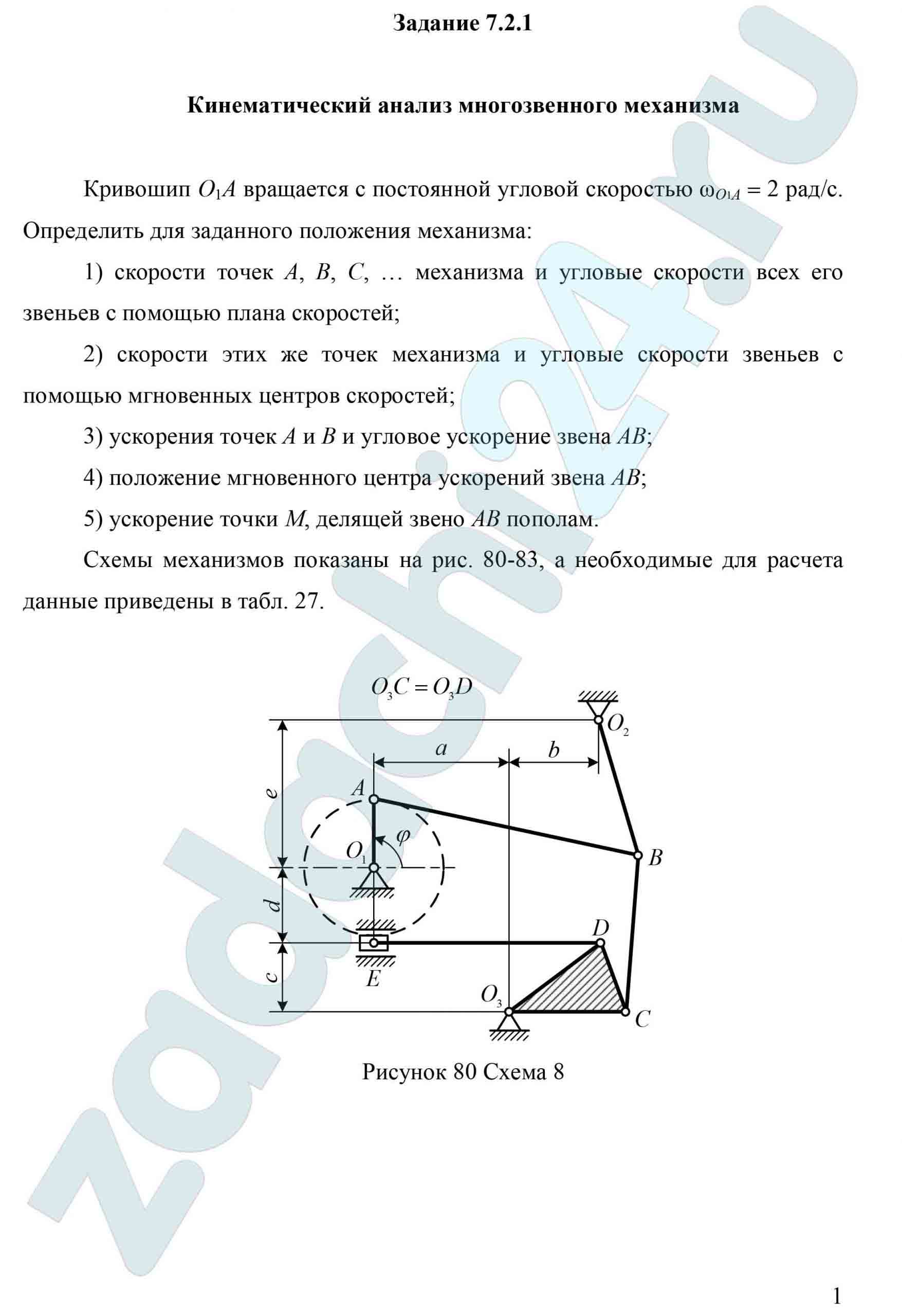
Кривошип О1А вращается с постоянной угловой скоростью ωО1А = 2 рад/с. Определить для заданного положения механизма:
1) скорости точек А, В, С, … механизма и угловые скорости всех его звеньев с помощью плана скоростей;
2) скорости этих же точек механизма и угловые скорости звеньев с помощью мгновенных центров скоростей;
3) ускорения точек А и В и угловое ускорение звена АВ;
4) положение мгновенного центра ускорений звена АВ;
5) ускорение точки М, делящей звено АВ пополам.
Схемы механизмов показаны на рис. 80-83, а необходимые для расчета данные приведены в табл. 27.
Таблица 27
| Номер варианта (рис. 80-83) | φ, град | Расстояния, см | ||||
| a | b | c | d | e | ||
| 8 | 90 | 27 | 18 | 14 | 15 | 30 |
Конец таблицы 72
| Длина звеньев, см | ||||||
| О1А | О2В | O3D | АВ | ВС | CD | DE |
| 14 | 29 | 23 | 55 | 32 | 15 | 45 |



7.3 Определение характеристик движения точек и тел плоского механизма
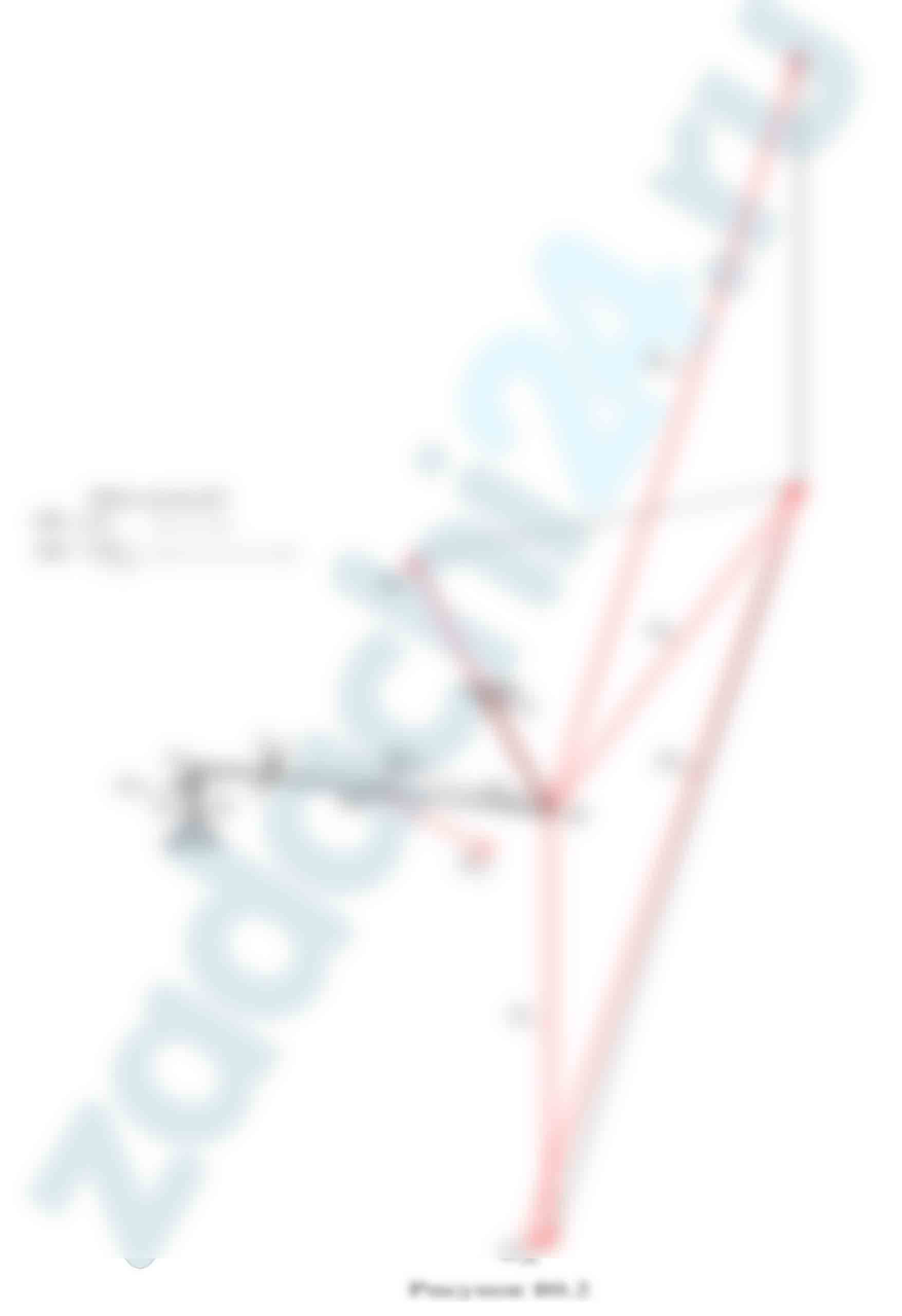
Плоский механизм, расположенный в вертикальной плоскости, состоит из стержней 1, 2, 3 катка 4 и ползуна 5, соединенных между собой и с неподвижной опорой O шарнирами (рис. K2.0 ÷ K2.9).
Качение катка 4 происходит без скольжения и отрыва от плоскости. Длины стержней l1, l2, l3, радиус катка R4 и другие необходимые для расчета размеры указаны на рисунках.
В некоторый момент времени положение движущегося механизма определяется углами α, β, γ, δ. Значения этих углов, а также величина угловой скорости ведущего звена или линейная скорость одной из точек механизма указаны в табл. K2.
Для данного положения механизма определить величины, указанные в таблице в столбце «Найти».
Таблица К2
Таблица исходных данных
| Номер условия 1 | |||||||
| Углы в градусах | Дано | Найти | |||||
| α | β | γ | δ | ω1, с-1 | VB, м/c | VС, м/c | |
| 30 | 90 | 45 | 45 | — | -1 | — | ω1, ω2, ω3, ω4,
VА, VС |


ВУЗ: ИРНИТУ
Все задачи из: Теоретическая механика ИРНИТУ
7.4 Плоский механизм состоит из стержней 1, 2, 3, 4 и ползуна В или Е (рис.0–7) или из стержней 1, 2, 3 и ползунов В и Е (рис.8,9), соединённых друг с другом и с неподвижными опорами О1, О2 шарнирами; точка D находится в середине стержня AB. l1=0,4 м, l2=1,2 м, l3=1,4 м, l4=0,6 м. Положение механизма определяется α, β, γ, φ, θ. Значения этих углов и других заданных величин указаны в табл.К2, б (для рис. 5–9).
Определить величины, указанные в таблицах в столбцах «Найти».
Дуговые стрелки на рисунках показывают, как при построении чертежа механизма должны откладываться соответствующие углы: по ходу или против хода часовой стрелки (например, угол φ на рис. 9 –против часовой стрелки и т. д.).
Построение чертежа начинать со стержня, направление которого определяется углом альфа ; ползун с направляющими для большей наглядности изобразить так, как в примере К2 (см. рис.К2,б).
Заданную угловую скорость считать направленной против часовой стрелки, а заданную скорость VB – от точки B к b (на рис. К5–К9).
Указание. Задача К2 – на исследование плоскопараллельного движения твёрдого тела. При её решении для определения скоростей точек механизма и угловых скоростей его звеньев следует воспользоваться теоремой о проекциях скоростей двух точек тела и понятием о мгновенном центре скоростей, применяя эту теорему (или это понятие) к каждому звену механизма в отдельности.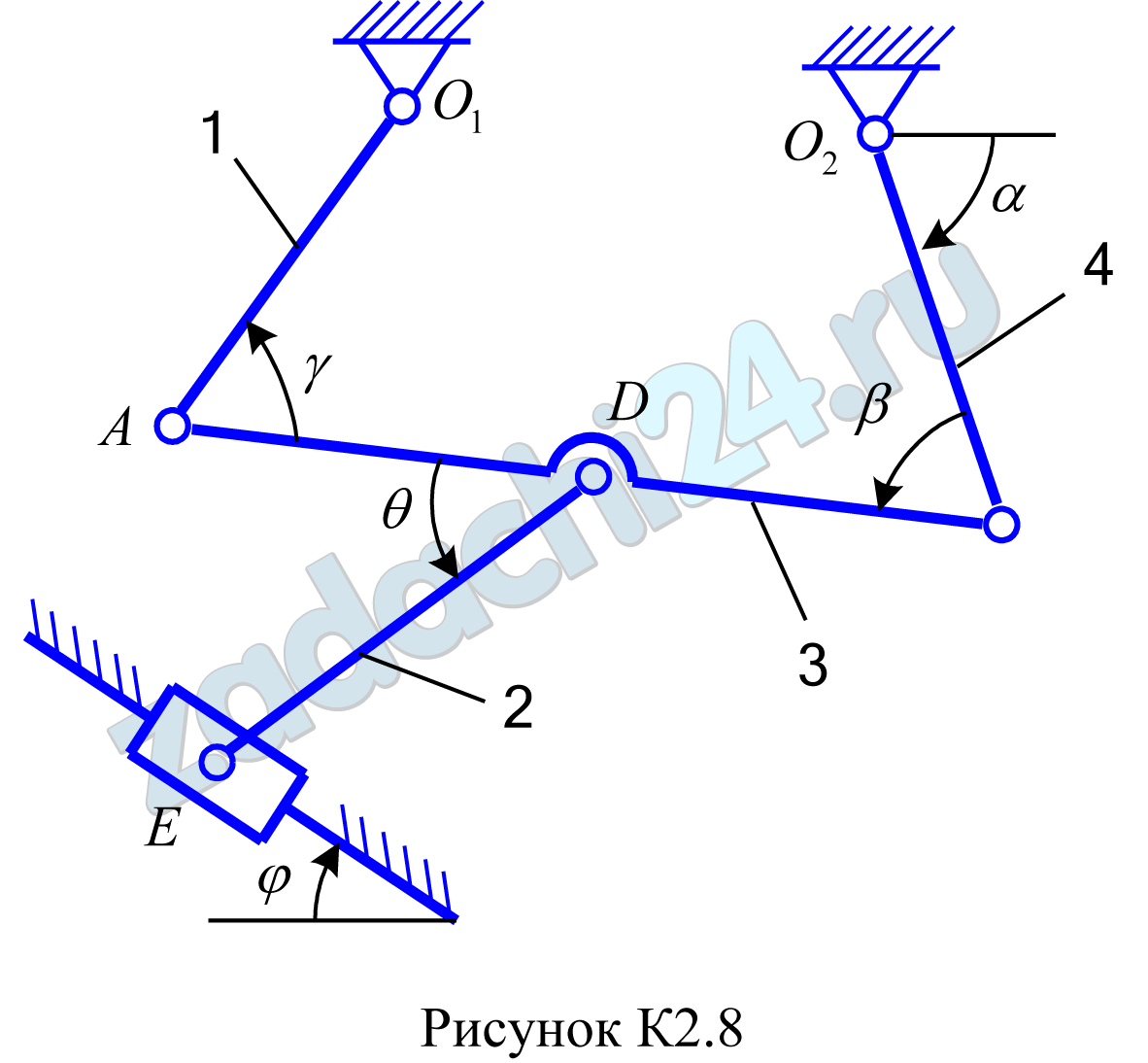
Таблица К2.б (для рис.5-9)
| Номер условия | Углы, град | ||||
| α | β | γ | φ | θ | |
| 1 | 0 | 60 | 90 | 0 | 120 |
Продолжение таблицы К2.б
| Дано | Найти | ||
| ω1, c-1 | ω4, c-1 | V точек | ω звена |
| — | 4 | А, Е | DE |
7.5 ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Для заданного положения механизма найти:
1 Скорости точек В и С и угловую скорость тела, которому они принадлежат.
2 Ускорение этих точек и угловое ускорение указанного в пункте 1 тела.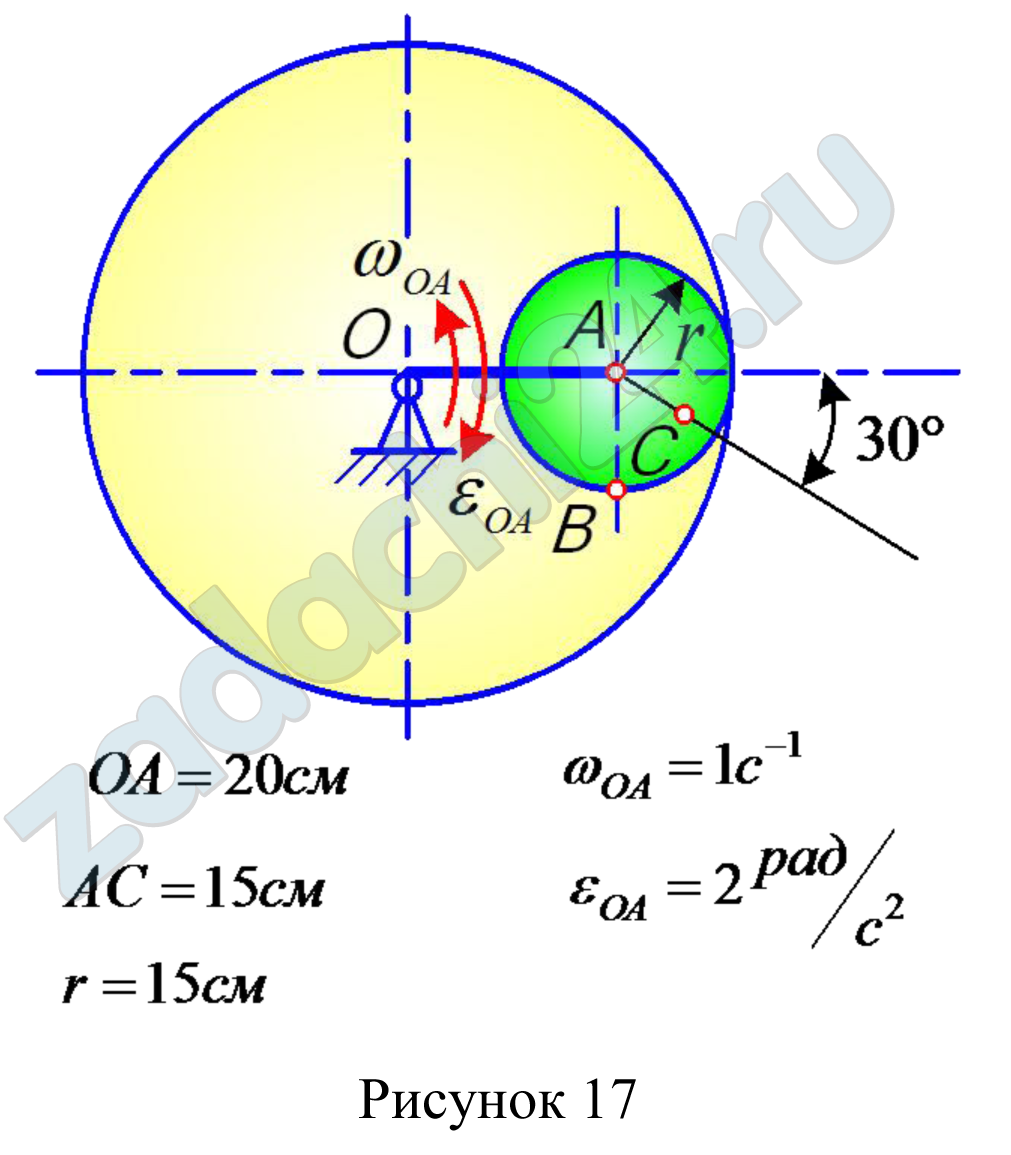
Примечание: внимательно ознакомьтесь с указаниями кафедры. Возможно, пункт 2 этой задачи выполнять не следует.
Скачать файл (банки РФ) 200 RUB7.6 Груз 1, движущийся прямолинейно и поступательно по закону x(t)=c2t²+c1t+c0 (положительное направление для x соответствует направлению оси x на рис. 1), привязан к концу нити, намотанной на одно из колес (нить считать нерастяжимой), и приводит в движение механизм, состоящий из тел 1, 2, 3, 4, находящихся в зацеплении или связанных ременной передачей Проскальзывание между колесами, шкивами и ремнем отсутствует.
Определить:
1) постоянные в законе движения груза 1: x(t)=c2t²+c1t+c0, если в начальный момент времени груз прошел х0, см и имел скорость V0, см/c, а для времени t2 груз прошел х2, см;
2) кроме того, необходимо определить для времени t1 скорость и ускорение груза 1, угловые скорости и угловые ускорения колес 2, 3, 4 механизма; а также, скорость, касательное, нормальное и полное ускорение точки M.
Таблица 1 – Исходные данные
| Вариант 1244 | ||||
| r1, см | t1, с | х0, см | r2, см | t2, с |
| 10 | 2 | 2 | 45 | 7 |
Продолжение таблицы 1
| V0, см/c | r3, см | х2, см | r4, см | № схемы |
| 5 | 20 | 20 | 47 | 4 |
ВУЗ: ЮУрГУ
7.7 Вращательное движение тела
Вал электродвигателя, связанный со шкивом 1 ременной передачи, вращается равнозамедленно (схема 1, рис. 5.1) или равноускоренно (схема 2, рис. 5.1) в течение t секунд. Найти передаточные числа передач, угловые скорости и угловые ускорения звеньев, скорость и ускорения указанной точки M для момента времени t1.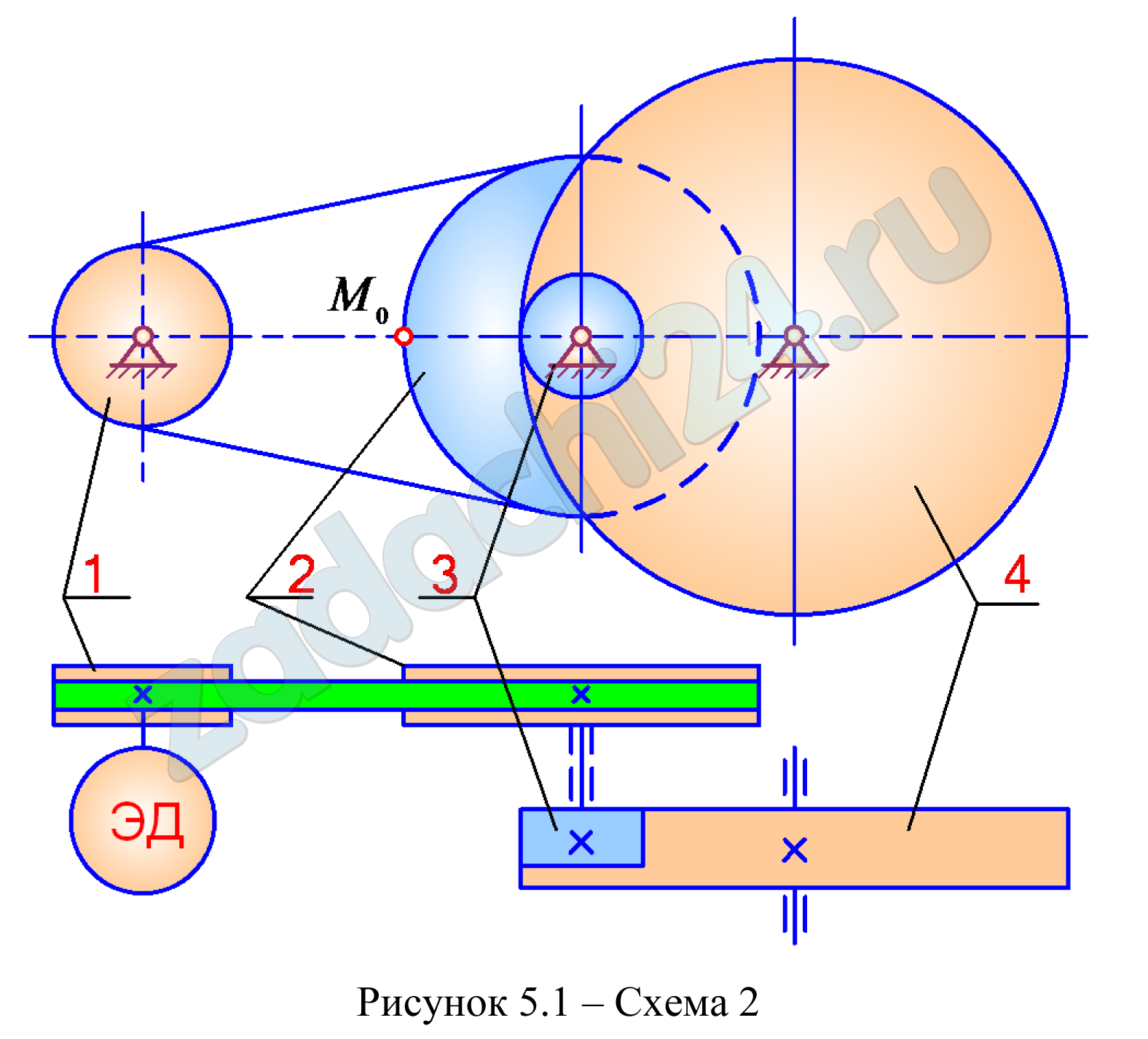
Таблица 5.3 – Исходные данные
| Вариант | Схема (рис. 5.1) |
n, об/мин | t, c | t1, c | d1, d2, d3, d4, мм |
| 20 | 2 | Разгон от нуля до 1000 об/мин |
0,5 | 0,5 | 100, 200, 60, 300 |
7.8 (Вариант 531) Тема «Плоское движение твердого тела»
Кривошип ОА длиной R вращается вокруг неподвижной оси О с постоянной угловой скоростью ω и приводит в движение шатун АВ длиной l и ползун В. Для заданного положения механизма найти скорости и ускорения ползуна В и точки С, а также угловую скорость и угловое ускорение звена, которому эта точка принадлежит.
Схемы механизмов приведены на рис. 9, а необходимые для расчета данные – в табл. 7.
Таблица 7
| R, см | l, см | α, град | β, град | ω, c-1 | Номер схемы (рис. 9) |
АС |
| 40 | 50 | 60 | 45 | 10 | 1 | 0,2 |
Примечание. Если при заданных значениях углов окажется, что шатун АВ перпендикулярен направляющим ползуна (см. рис. 9, схемы 1, 6), то значение угла β следует принять равным 15º.
Скачать файл (банки РФ) 300 RUB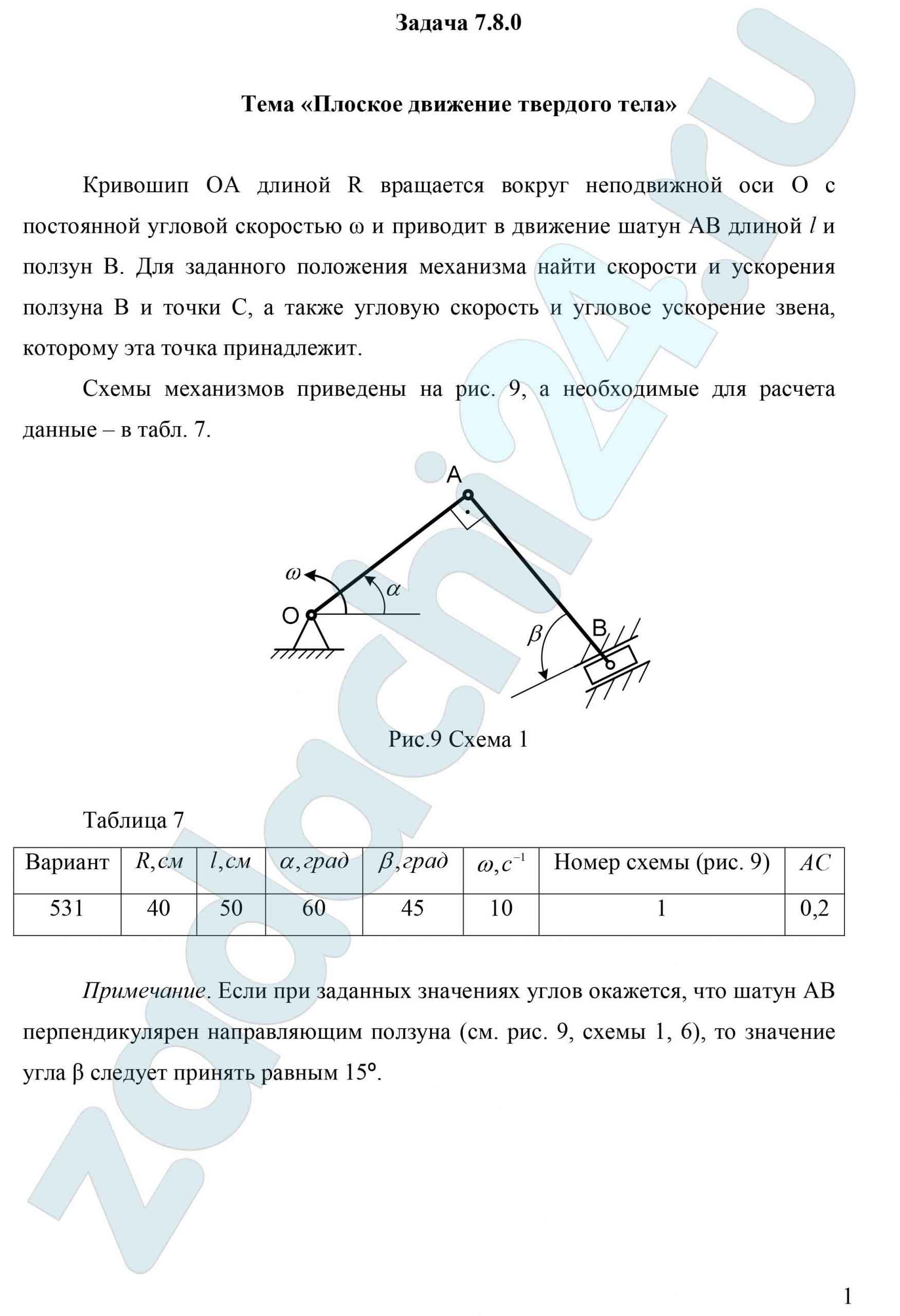

ВУЗ: РГППУ
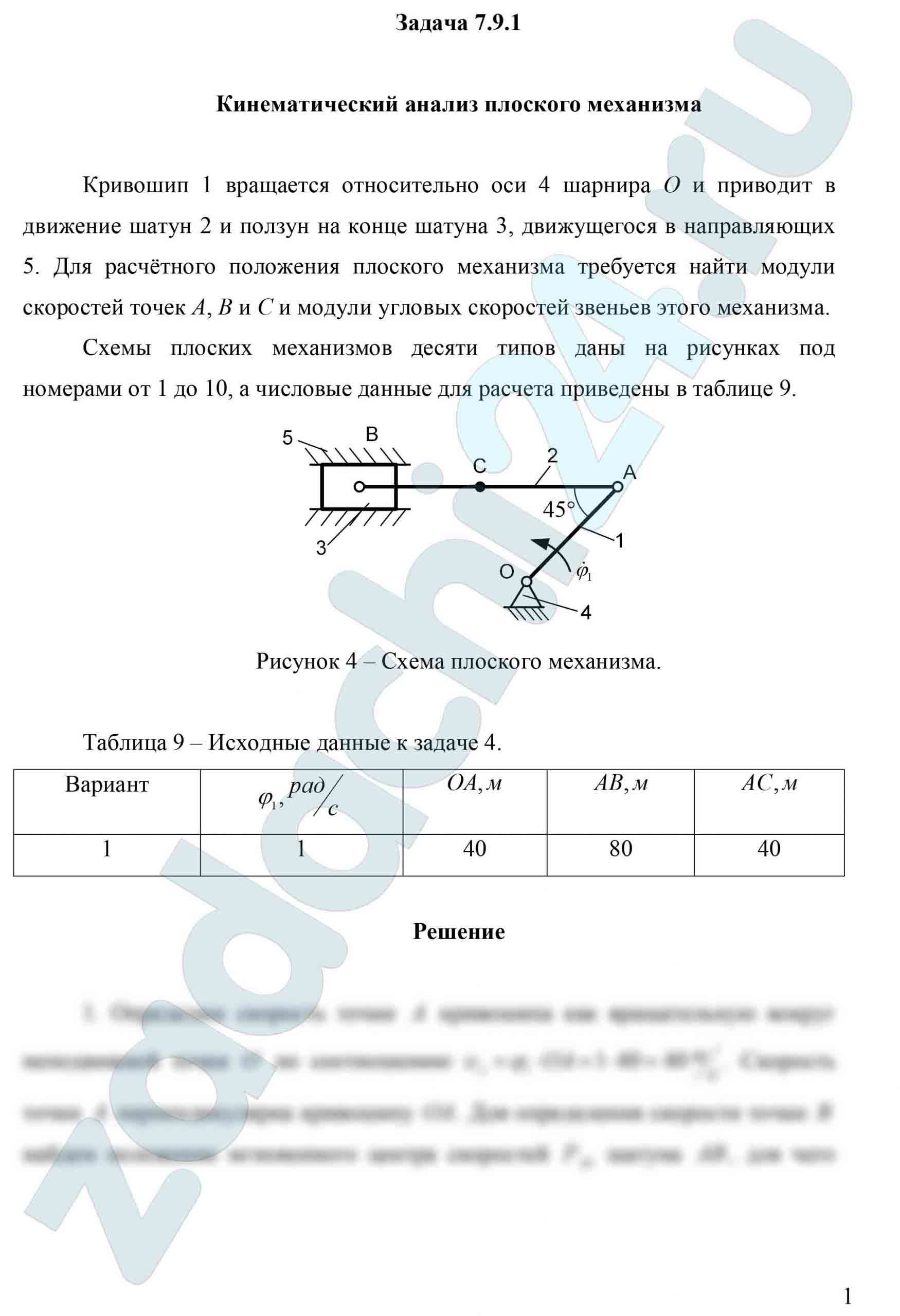
7.9 Кинематический анализ плоского механизма
Кривошип 1 вращается относительно оси 4 шарнира О и приводит в движение шатун 2 и ползун на конце шатуна 3, движущегося в направляющих 5. Для расчётного положения плоского механизма требуется найти модули скоростей точек А, В и С и модули угловых скоростей звеньев этого механизма.
Схемы плоских механизмов десяти типов даны на рисунках под номерами от 1 до 10, а числовые данные для расчета приведены в таблице 9.
Таблица 9 – Исходные данные к задаче 4
| Вариант | φ1, рад/с | ОА, м | АВ, м | АС, м |
| 1 | 1 | 40 | 80 | 40 |
Варианты задачи: 6.
ВУЗ: РГАЗУ
Все задачи из: Горюнов С.В. Семенов В.А. РГАЗУ 2017 Теоретическая механика
7.10 Кинематика плоских механизмов
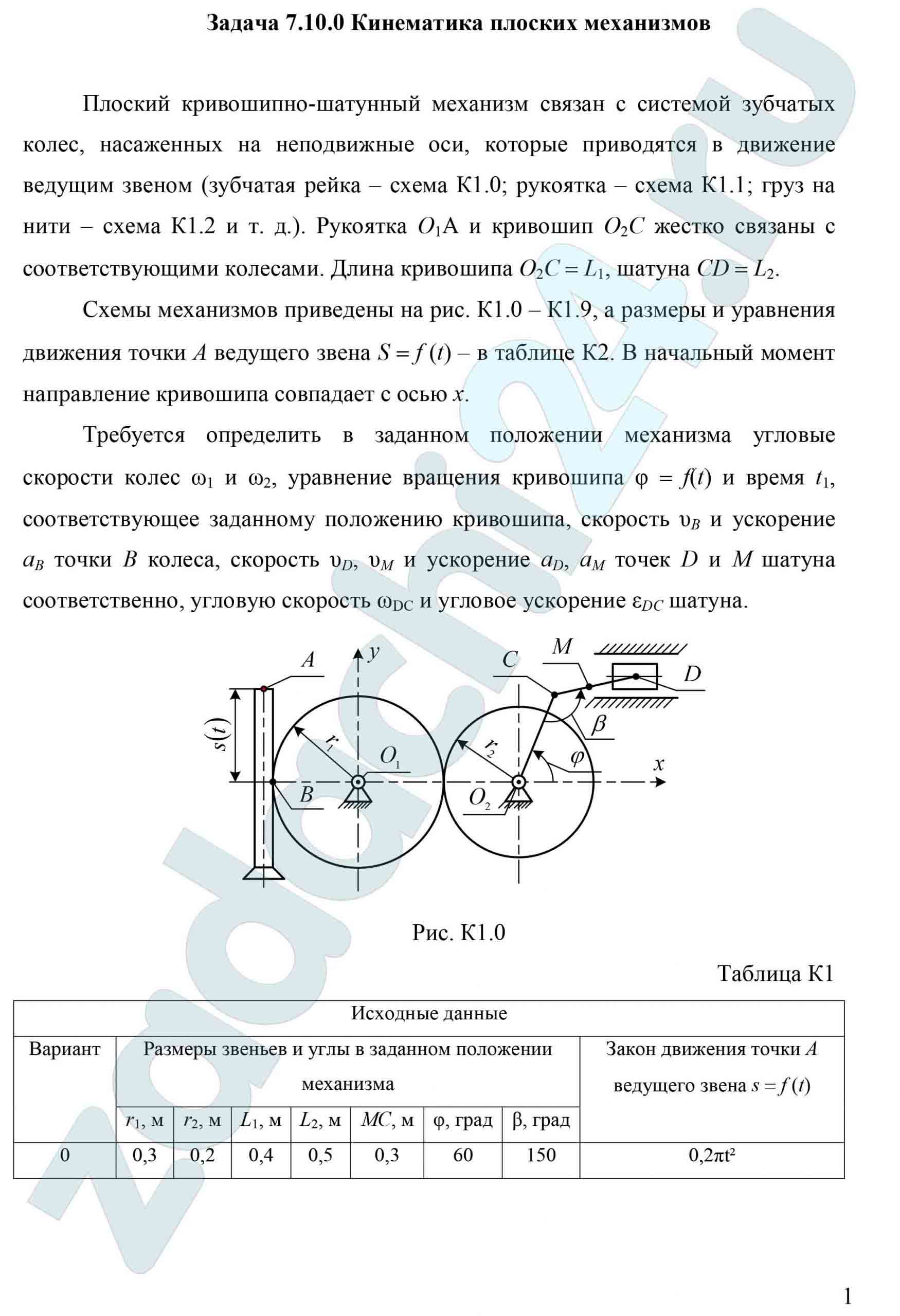
Плоский кривошипно-шатунный механизм связан с системой зубчатых колес, насаженных на неподвижные оси, которые приводятся в движение ведущим звеном (зубчатая рейка – схема К1.0; рукоятка – схема К1.1; груз на нити – схема К1.2 и т. д.). Рукоятка О1А и кривошип О2С жестко связаны с соответствующими колесами. Длина кривошипа О2С = L1, шатуна CD = L2.
Схемы механизмов приведены на рис. К1.0 – К1.9, а размеры и уравнения движения точки А ведущего звена S = f (t) – в таблице К2. В начальный момент направление кривошипа совпадает с осью x.
Требуется определить в заданном положении механизма угловые скорости колес ω1 и ω2, уравнение вращения кривошипа φ = f(t) и время t1, соответствующее заданному положению кривошипа, скорость υВ и ускорение аВ точки В колеса, скорость υD, υM и ускорение аD, аM точек D и М шатуна соответственно, угловую скорость ωDC и угловое ускорение εDC шатуна.
Таблица К1
| Номер условия 0 | |||||||
| Исходные данные | |||||||
| Размеры звеньев и углы в заданном положении механизма | Закон движения точки А ведущего звена s = f (t) | ||||||
| r1, м | r2, м | L1, м | L2, м | МС, м | φ, град | β, град | |
| 0,3 | 0,2 | 0,4 | 0,5 | 0,3 | 60 | 150 | 0,2πt² |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.

ВУЗ: СамГУПС
