7 Простейшие движения твердого тела
7.21 Груз 1, подвешенный на нерастяжимой нити, намотанной на барабан 2, опускается по закону х = x(t). По заданному уравнению х = x(t) прямолинейного поступательного движения груза определить скорость и ускорение точки М механизма в момент времени, когда груз пройдет расстояние S.
| № строки | х = x(t), (х — см, t — с) | R2, см | r2, см | R3, см | S, м |
| 9 | 60 + 4t² | 60 | 45 | 36 | 0,5 |
Все задачи из: Михайленко Н.И. Живаго Э.Я. Теоретическая механика СибГИУ
7.22 Определение кинематических характеристик движения твердых тел
Плоский механизм, расположенный в вертикальной плоскости, состоит из стержней 1, 2, 3 катка 4 и ползуна 5, соединенных между собой и с неподвижной опорой O шарнирами (рис. K2.0 ÷ K2.9). Качение катка 4 происходит без скольжения и отрыва от плоскости. Длины стержней l1, l2, l3, радиус катка R4 и другие необходимые для расчета размеры указаны на рисунках. В некоторый момент времени положение движущегося механизма определяется углами α, β, γ, δ. Значения этих углов, а также величина угловой скорости ведущего звена или линейная скорость одной из точек механизма указаны в табл. K2.
Для данного положения механизма определить величины, указанные в таблице в столбце «Найти».

Таблица К2
Таблица исходных данных
| Номер условия | Углы в градусах | Дано | Найти | |||||
| α | β | γ | δ | ω1, с-1 | VB, м/c | VС, м/c | ||
| 0 | 60 | 135 | 90 | 30 | 2 | — | — | ω2, ω3, ω4, VА, VВ, VС |
Все задачи из: Теоретическая механика ИРНИТУ
7.23 Задание K2. Определение кинематических характеристик движения твердых тел
Плоский механизм, расположенный в вертикальной плоскости, состоит из стержней 1, 2, 3 катка 4 и ползуна 5, соединенных между собой и с неподвижной опорой O шарнирами (рис. K2.0 ÷ K2.9). Качение катка 4 происходит без скольжения и отрыва от плоскости. Длины стержней l1, l2, l3, радиус катка R4 и другие необходимые для расчета размеры указаны на рисунках. В некоторый момент времени положение движущегося механизма определяется углами α, β, γ, δ. Значения этих углов, а также величина угловой скорости ведущего звена или линейная скорость одной из точек механизма указаны в табл. K2.
Для данного положения механизма определить величины, указанные в таблице в столбце «Найти».


ВУЗ: ИРНИТУ
Все задачи из: Теоретическая механика ИРНИТУ
7.24 В планетарном механизме (рис.3.1-3.6) шестерня I радиуса R1 неподвижна, а кривошип OA, вращаясь вокруг неподвижной оси, проходящей через точку O перпендикулярно плоскости рисунка, приводит в движение свободно насаженную на его конец A шестерню II радиуса R2 . Для указанного на рисунке положения механизма найти скорости и ускорения точек A и B, если для соответствующего момента времени известны абсолютные величины угловой скорости и углового ускорения кривошипа (ωOA, εOA). На рисунках условно показаны направления угловой скорости и углового ускорения дуговыми стрелками вокруг оси вращения. При этом направление угловой скорости соответствует направлению вращательного движения кривошипа. Угловое ускорение направлено в сторону угловой скорости при ускоренном вращении и в противоположную — при замедленном.
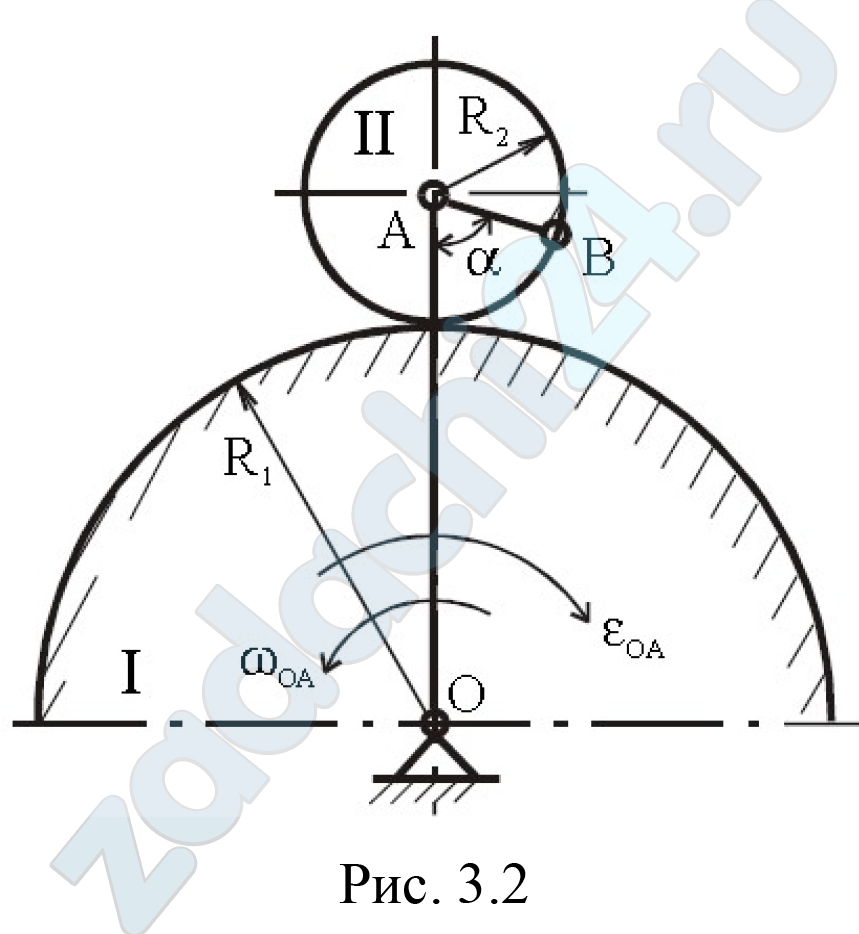
Таблица 3
| № варианта | № рисунка | ωOA, (с-1) | εOA, (с-2) | R1, (м) | R2, (м) | α, (град) |
| 2 | 3.2 | 1 | 8 | 0,6 | 0,1 | 30 |
7.25 В планетарном механизме (рис.3.1-3.6) шестерня I радиуса R1 неподвижна, а кривошип OA, вращаясь вокруг неподвижной оси, проходящей через точку O перпендикулярно плоскости рисунка, приводит в движение свободно насаженную на его конец A шестерню II радиуса R2 . Для указанного на рисунке положения механизма найти скорости и ускорения точек A и B, если для соответствующего момента времени известны абсолютные величины угловой скорости и углового ускорения кривошипа (ωOA, εOA). На рисунках условно показаны направления угловой скорости и углового ускорения дуговыми стрелками вокруг оси вращения. При этом направление угловой скорости соответствует направлению вращательного движения кривошипа. Угловое ускорение направлено в сторону угловой скорости при ускоренном вращении и в противоположную — при замедленном.
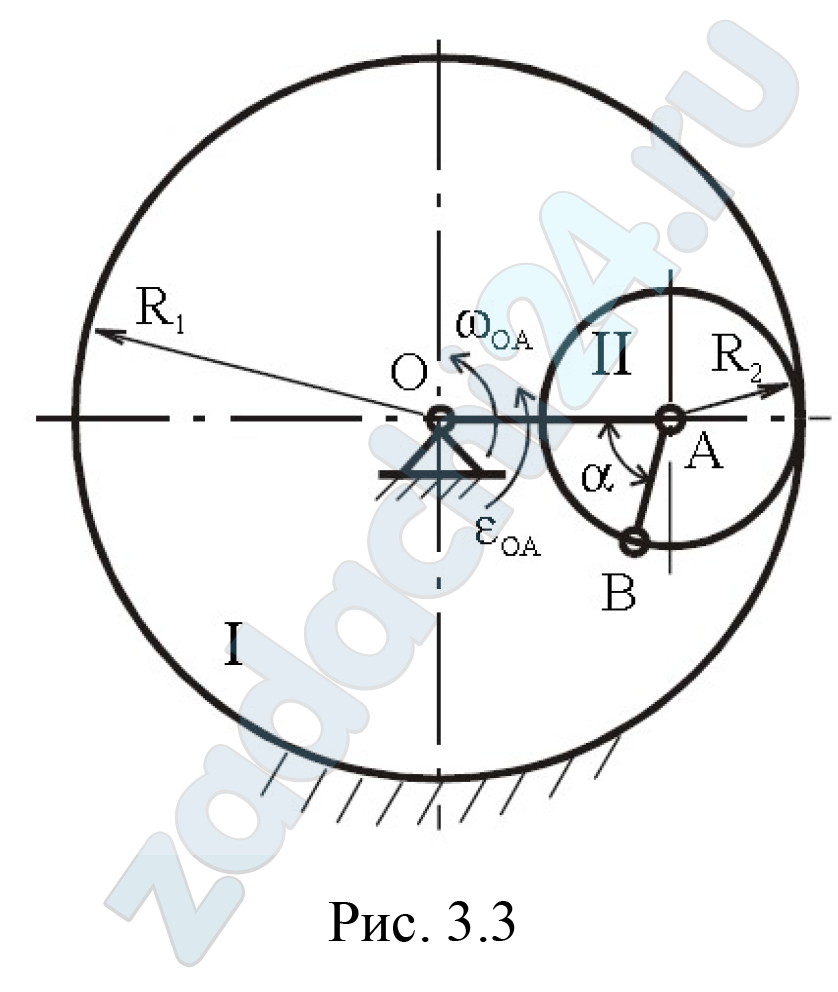
Таблица 3
| № варианта | № рисунка | ωOA, (с-1) | εOA, (с-2) | R1, (м) | R2, (м) | α, (град) |
| 3 | 3.3 | 2 | 7 | 0,7 | 0,2 | 60 |
