Мустафаев Ю.К. Червинский В.П. Теоретическая механика СамГУПС Самара 2020
11.1 Применение теоремы об изменении кинетической энергии к исследованию движения механической системы
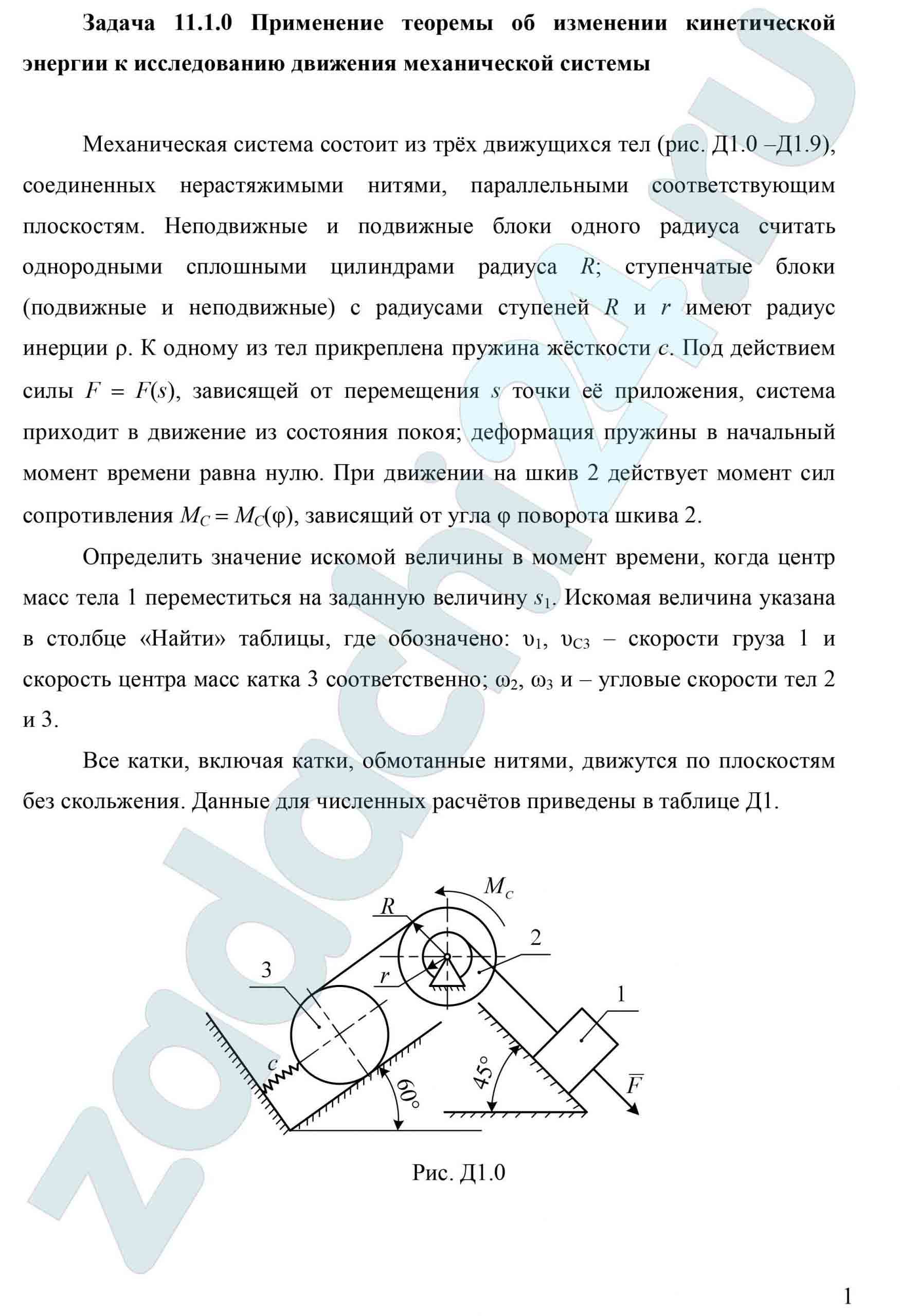
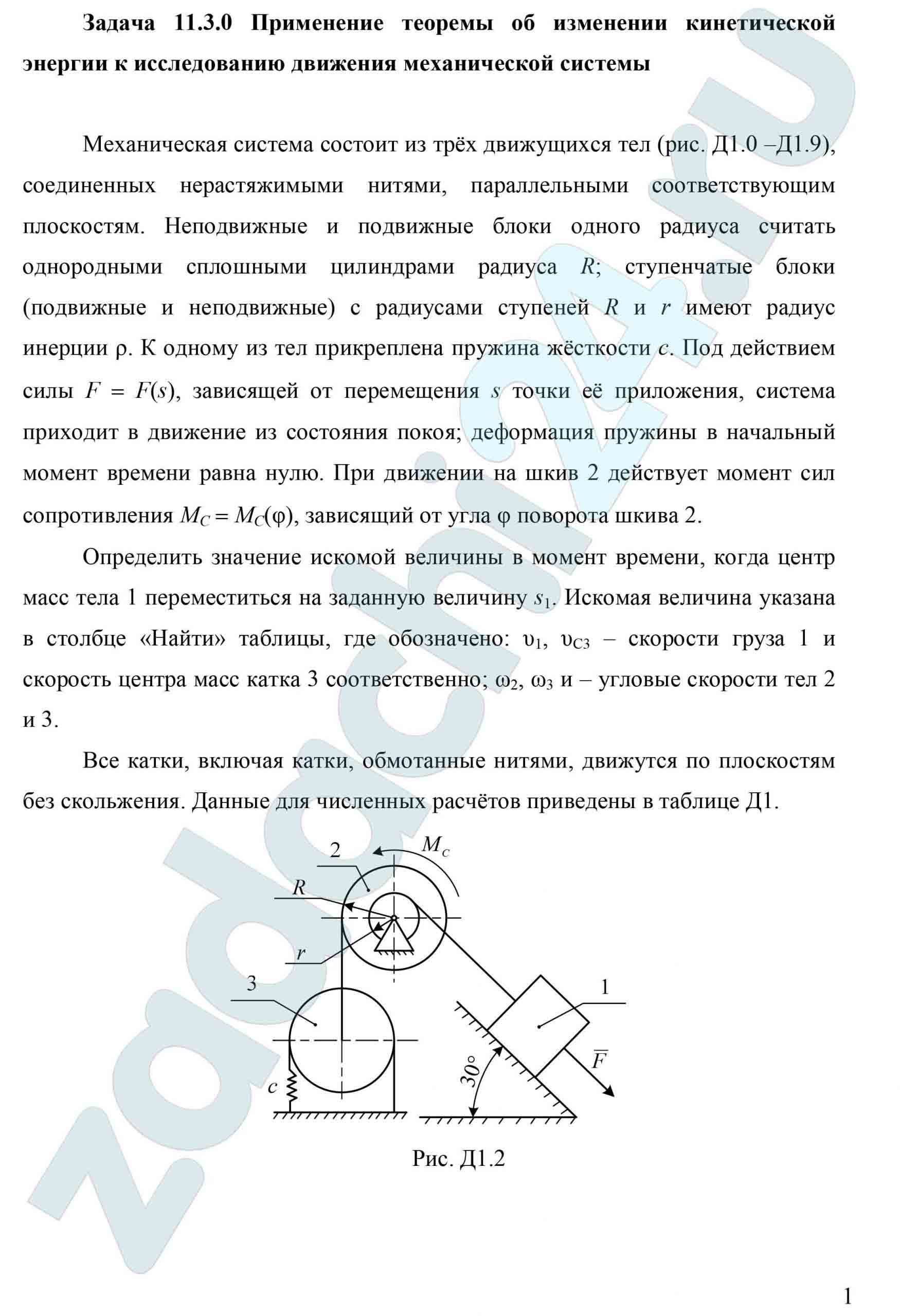
Механическая система состоит из трёх движущихся тел (рис. Д1.0 –Д1.9), соединенных нерастяжимыми нитями, параллельными соответствующим плоскостям. Неподвижные и подвижные блоки одного радиуса считать однородными сплошными цилиндрами радиуса R; ступенчатые блоки (подвижные и неподвижные) с радиусами ступеней R и r имеют радиус инерции ρ. К одному из тел прикреплена пружина жёсткости c. Под действием силы F = F(s), зависящей от перемещения s точки её приложения, система приходит в движение из состояния покоя; деформация пружины в начальный момент времени равна нулю. При движении на шкив 2 действует момент сил сопротивления MC = MC(φ), зависящий от угла φ поворота шкива 2.
Определить значение искомой величины в момент времени, когда центр масс тела 1 переместиться на заданную величину s1. Искомая величина указана в столбце «Найти» таблицы, где обозначено: υ1, υC3 – скорости груза 1 и скорость центра масс катка 3 соответственно; ω2, ω3 и – угловые скорости тел 2 и 3.
Все катки, включая катки, обмотанные нитями, движутся по плоскостям без скольжения. Данные для численных расчётов приведены в таблице Д1.
Таблица Д1
| Номер
условия |
m1, кг | m2, кг | m3, кг | с, Н/м | MC(φ), Н·м |
| 0 | 6 | 5 | 4 | 150 | 0,5 φ |
Продолжение таблицы Д1
| F = F(s), Н | ρ, м | s1, м | R, м | r, м | Найти |
| 80(4+4s) | 0,15 | 0,1 | 0,4 | 0,2 | υC3 |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.



ВУЗ: СамГУПС
11.2 Применение теоремы об изменении кинетической энергии к исследованию движения механической системы
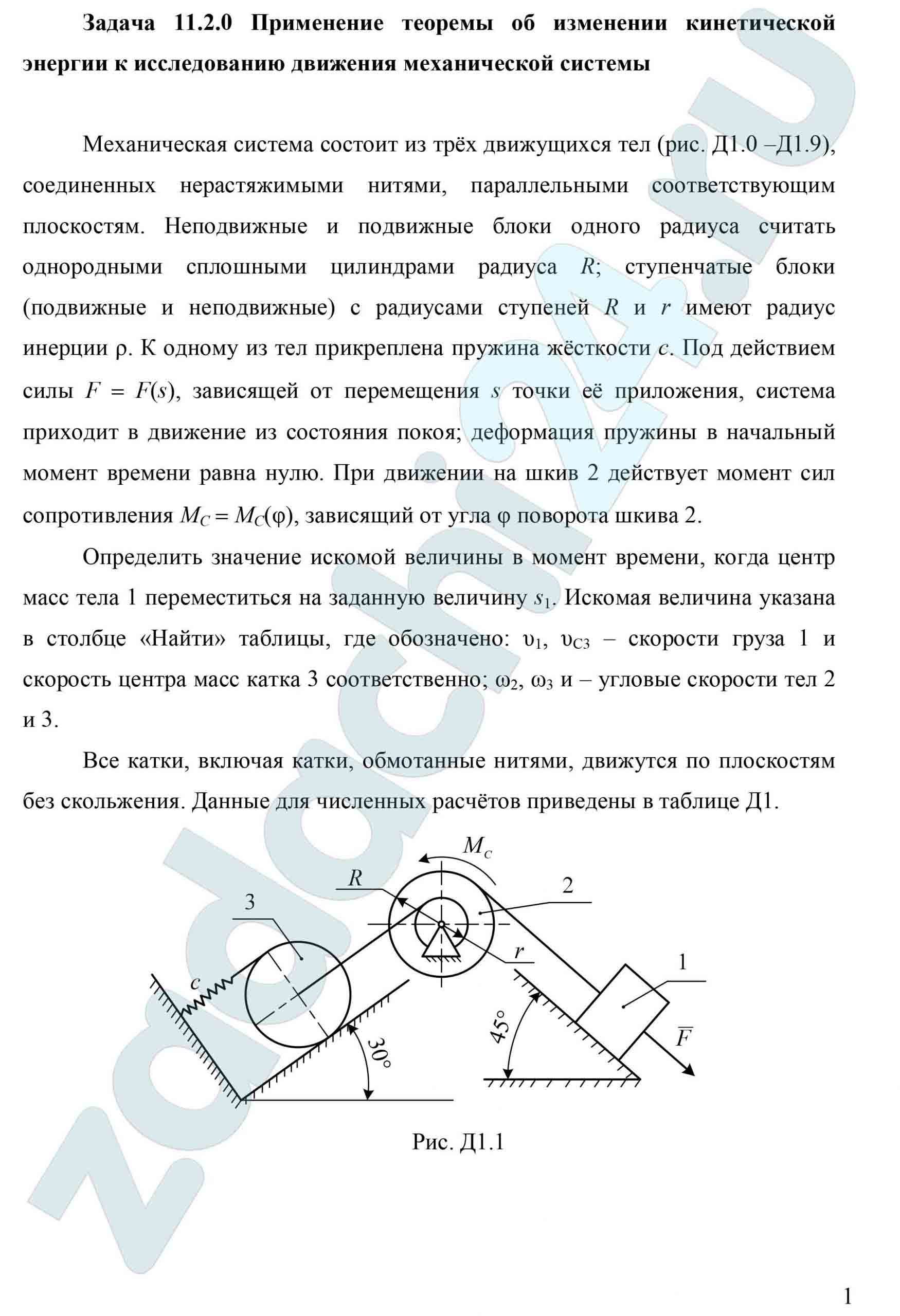
Механическая система состоит из трёх движущихся тел (рис. Д1.0 –Д1.9), соединенных нерастяжимыми нитями, параллельными соответствующим плоскостям. Неподвижные и подвижные блоки одного радиуса считать однородными сплошными цилиндрами радиуса R; ступенчатые блоки (подвижные и неподвижные) с радиусами ступеней R и r имеют радиус инерции ρ. К одному из тел прикреплена пружина жёсткости c. Под действием силы F = F(s), зависящей от перемещения s точки её приложения, система приходит в движение из состояния покоя; деформация пружины в начальный момент времени равна нулю. При движении на шкив 2 действует момент сил сопротивления MC = MC(φ), зависящий от угла φ поворота шкива 2.
Определить значение искомой величины в момент времени, когда центр масс тела 1 переместиться на заданную величину s1. Искомая величина указана в столбце «Найти» таблицы, где обозначено: υ1, υC3 – скорости груза 1 и скорость центра масс катка 3 соответственно; ω2, ω3 и – угловые скорости тел 2 и 3.
Все катки, включая катки, обмотанные нитями, движутся по плоскостям без скольжения. Данные для численных расчётов приведены в таблице Д1.
Таблица Д1
| Номер
условия |
m1, кг | m2, кг | m3, кг | с, Н/м | MC(φ), Н·м |
| 0 | 6 | 5 | 4 | 150 | 0,5 φ |
Продолжение таблицы Д1
| F = F(s), Н | ρ, м | s1, м | R, м | r, м | Найти |
| 80(4+4s) | 0,15 | 0,1 | 0,4 | 0,2 | υC3 |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.



ВУЗ: СамГУПС
11.3 Применение теоремы об изменении кинетической энергии к исследованию движения механической системы
Механическая система состоит из трёх движущихся тел (рис. Д1.0 –Д1.9), соединенных нерастяжимыми нитями, параллельными соответствующим плоскостям. Неподвижные и подвижные блоки одного радиуса считать однородными сплошными цилиндрами радиуса R; ступенчатые блоки (подвижные и неподвижные) с радиусами ступеней R и r имеют радиус инерции ρ. К одному из тел прикреплена пружина жёсткости c. Под действием силы F = F(s), зависящей от перемещения s точки её приложения, система приходит в движение из состояния покоя; деформация пружины в начальный момент времени равна нулю. При движении на шкив 2 действует момент сил сопротивления MC = MC(φ), зависящий от угла φ поворота шкива 2.
Определить значение искомой величины в момент времени, когда центр масс тела 1 переместиться на заданную величину s1. Искомая величина указана в столбце «Найти» таблицы, где обозначено: υ1, υC3 – скорости груза 1 и скорость центра масс катка 3 соответственно; ω2, ω3 и – угловые скорости тел 2 и 3.
Все катки, включая катки, обмотанные нитями, движутся по плоскостям без скольжения. Данные для численных расчётов приведены в таблице Д1.
Таблица Д1
| Номер
условия |
m1, кг | m2, кг | m3, кг | с, Н/м | MC(φ), Н·м |
| 0 | 6 | 5 | 4 | 150 | 0,5 φ |
Продолжение таблицы Д1
| F = F(s), Н | ρ, м | s1, м | R, м | r, м | Найти |
| 80(4 + 4s) | 0,15 | 0,1 | 0,4 | 0,2 | υC3 |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.



ВУЗ: СамГУПС
11.4 Применение теоремы об изменении кинетической энергии к исследованию движения механической системы
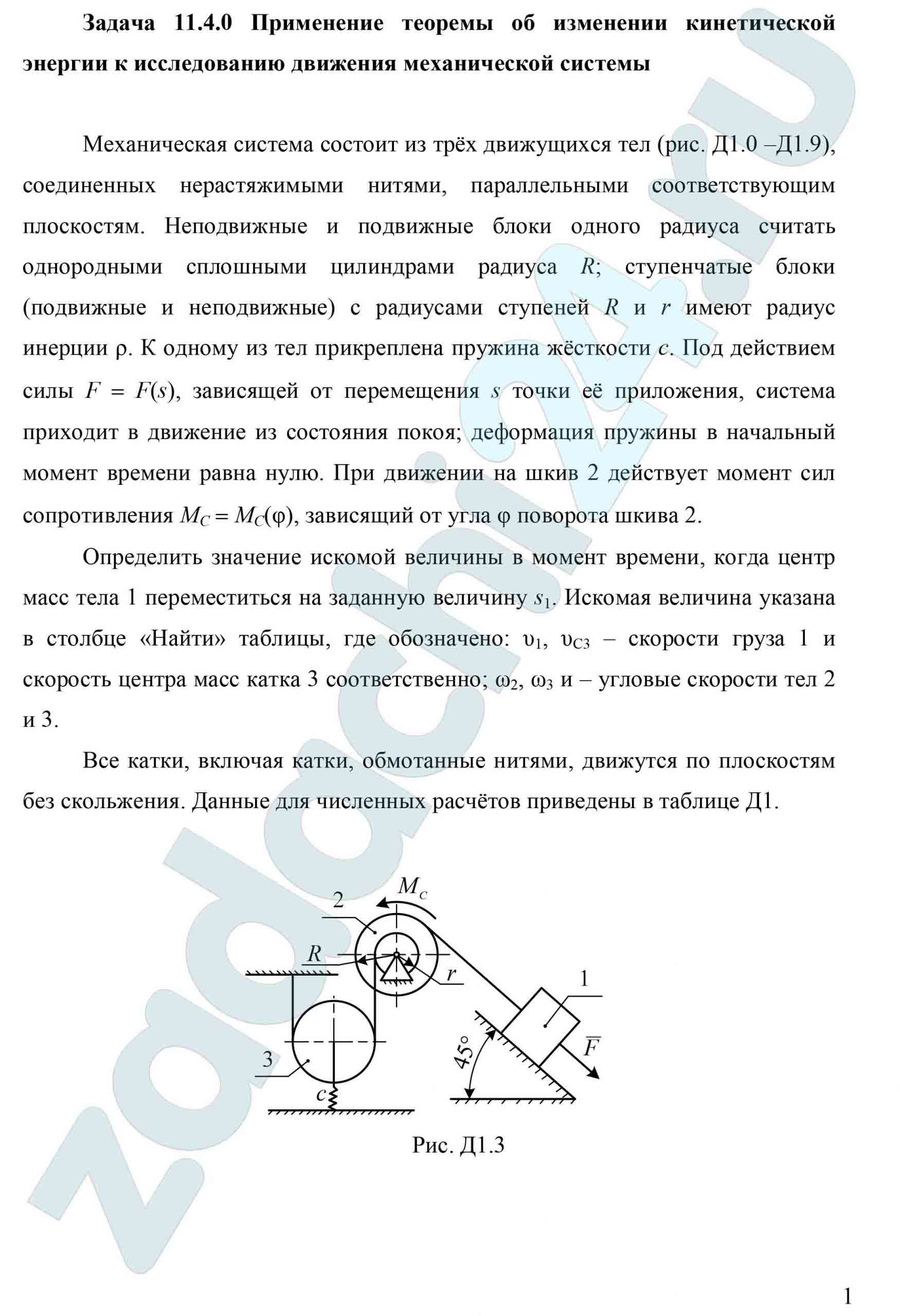
Механическая система состоит из трёх движущихся тел (рис. Д1.0 –Д1.9), соединенных нерастяжимыми нитями, параллельными соответствующим плоскостям. Неподвижные и подвижные блоки одного радиуса считать однородными сплошными цилиндрами радиуса R; ступенчатые блоки (подвижные и неподвижные) с радиусами ступеней R и r имеют радиус инерции ρ. К одному из тел прикреплена пружина жёсткости c. Под действием силы F = F(s), зависящей от перемещения s точки её приложения, система приходит в движение из состояния покоя; деформация пружины в начальный момент времени равна нулю. При движении на шкив 2 действует момент сил сопротивления MC = MC(φ), зависящий от угла φ поворота шкива 2.
Определить значение искомой величины в момент времени, когда центр масс тела 1 переместиться на заданную величину s1. Искомая величина указана в столбце «Найти» таблицы, где обозначено: υ1, υC3 – скорости груза 1 и скорость центра масс катка 3 соответственно; ω2, ω3 и – угловые скорости тел 2 и 3.
Все катки, включая катки, обмотанные нитями, движутся по плоскостям без скольжения. Данные для численных расчётов приведены в таблице Д1.
Таблица Д1
| Номер
условия |
m1, кг | m2, кг | m3, кг | с, Н/м | MC(φ), Н·м |
| 0 | 6 | 5 | 4 | 150 | 0,5 φ |
Продолжение таблицы Д1
| F = F(s), Н | ρ, м | s1, м | R, м | r, м | Найти |
| 80(4 + 4s) | 0,15 | 0,1 | 0,4 | 0,2 | υC3 |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.



ВУЗ: СамГУПС
11.5 Применение теоремы об изменении кинетической энергии к исследованию движения механической системы
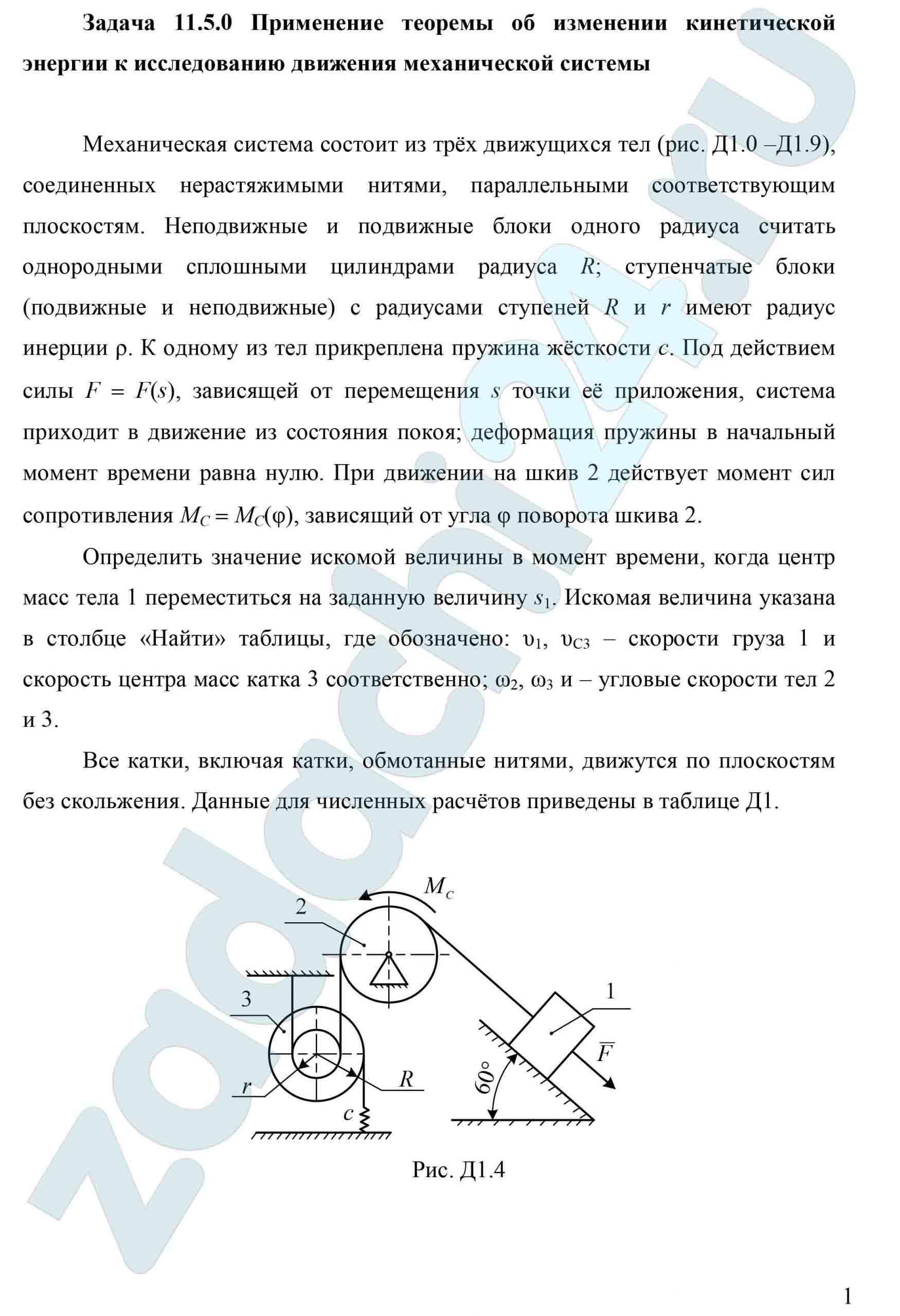
Механическая система состоит из трёх движущихся тел (рис. Д1.0 –Д1.9), соединенных нерастяжимыми нитями, параллельными соответствующим плоскостям. Неподвижные и подвижные блоки одного радиуса считать однородными сплошными цилиндрами радиуса R; ступенчатые блоки (подвижные и неподвижные) с радиусами ступеней R и r имеют радиус инерции ρ. К одному из тел прикреплена пружина жёсткости c. Под действием силы F = F(s), зависящей от перемещения s точки её приложения, система приходит в движение из состояния покоя; деформация пружины в начальный момент времени равна нулю. При движении на шкив 2 действует момент сил сопротивления MC = MC(φ), зависящий от угла φ поворота шкива 2.
Определить значение искомой величины в момент времени, когда центр масс тела 1 переместиться на заданную величину s1. Искомая величина указана в столбце «Найти» таблицы, где обозначено: υ1, υC3 – скорости груза 1 и скорость центра масс катка 3 соответственно; ω2, ω3 и – угловые скорости тел 2 и 3.
Все катки, включая катки, обмотанные нитями, движутся по плоскостям без скольжения. Данные для численных расчётов приведены в таблице Д1.
Таблица Д1
| Номер
условия |
m1, кг | m2, кг | m3, кг | с, Н/м | MC(φ), Н·м |
| 0 | 6 | 5 | 4 | 150 | 0,5 φ |
Продолжение таблицы Д1
| F = F(s), Н | ρ, м | s1, м | R, м | r, м | Найти |
| 80(4 + 4s) | 0,15 | 0,1 | 0,4 | 0,2 | υC3 |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.


ВУЗ: СамГУПС
11.6 Применение теоремы об изменении кинетической энергии к исследованию движения механической системы
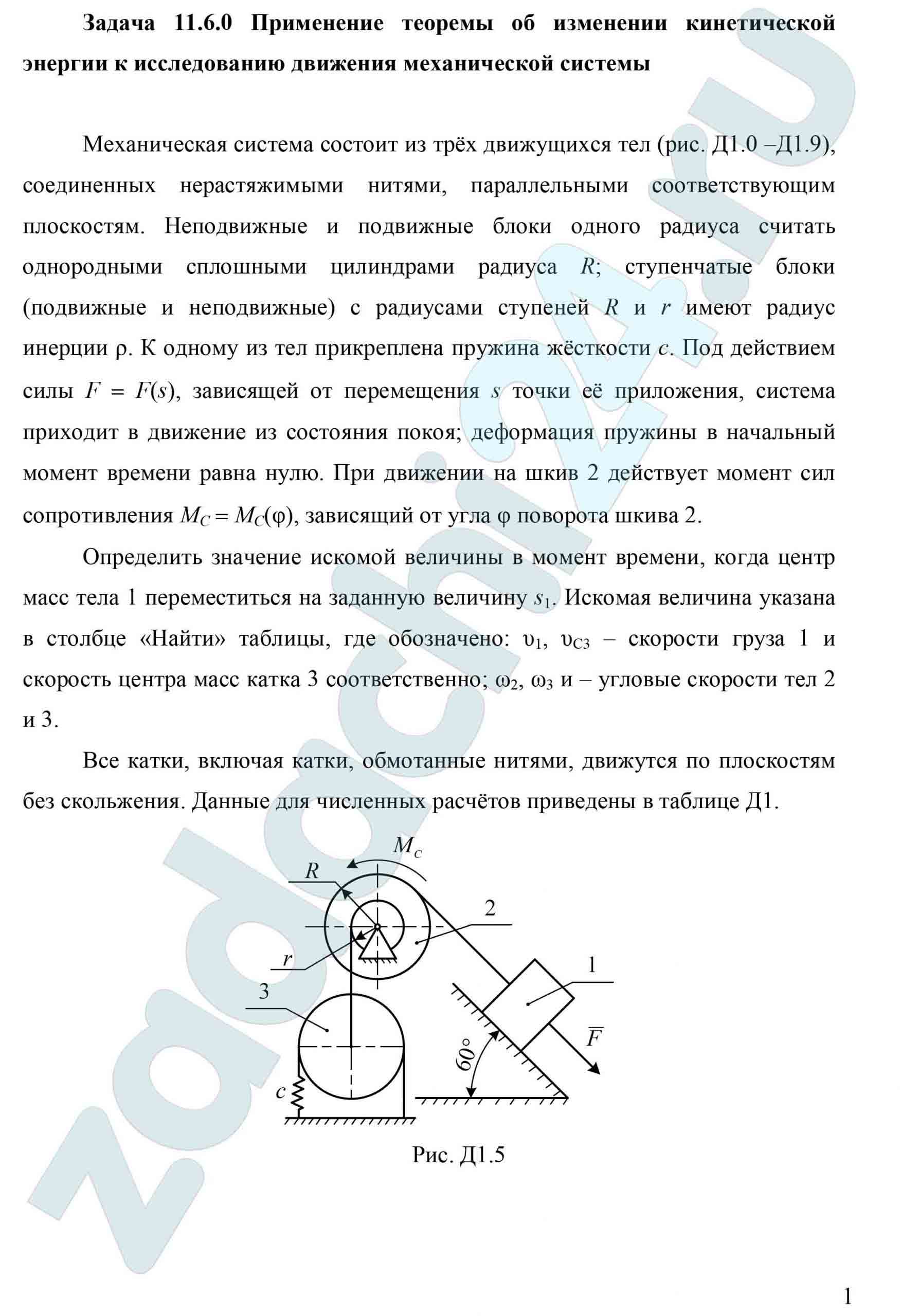
Механическая система состоит из трёх движущихся тел (рис. Д1.0 –Д1.9), соединенных нерастяжимыми нитями, параллельными соответствующим плоскостям. Неподвижные и подвижные блоки одного радиуса считать однородными сплошными цилиндрами радиуса R; ступенчатые блоки (подвижные и неподвижные) с радиусами ступеней R и r имеют радиус инерции ρ. К одному из тел прикреплена пружина жёсткости c. Под действием силы F = F(s), зависящей от перемещения s точки её приложения, система приходит в движение из состояния покоя; деформация пружины в начальный момент времени равна нулю. При движении на шкив 2 действует момент сил сопротивления MC = MC(φ), зависящий от угла φ поворота шкива 2.
Определить значение искомой величины в момент времени, когда центр масс тела 1 переместиться на заданную величину s1. Искомая величина указана в столбце «Найти» таблицы, где обозначено: υ1, υC3 – скорости груза 1 и скорость центра масс катка 3 соответственно; ω2, ω3 и – угловые скорости тел 2 и 3.
Все катки, включая катки, обмотанные нитями, движутся по плоскостям без скольжения. Данные для численных расчётов приведены в таблице Д1.
Таблица Д1
| Номер
условия |
m1, кг | m2, кг | m3, кг | с, Н/м | MC(φ), Н·м |
| 0 | 6 | 5 | 4 | 150 | 0,5 φ |
Продолжение таблицы Д1
| F = F(s), Н | ρ, м | s1, м | R, м | r, м | Найти |
| 80(4 + 4s) | 0,15 | 0,1 | 0,4 | 0,2 | υC3 |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.



ВУЗ: СамГУПС
11.7 Применение теоремы об изменении кинетической энергии к исследованию движения механической системы
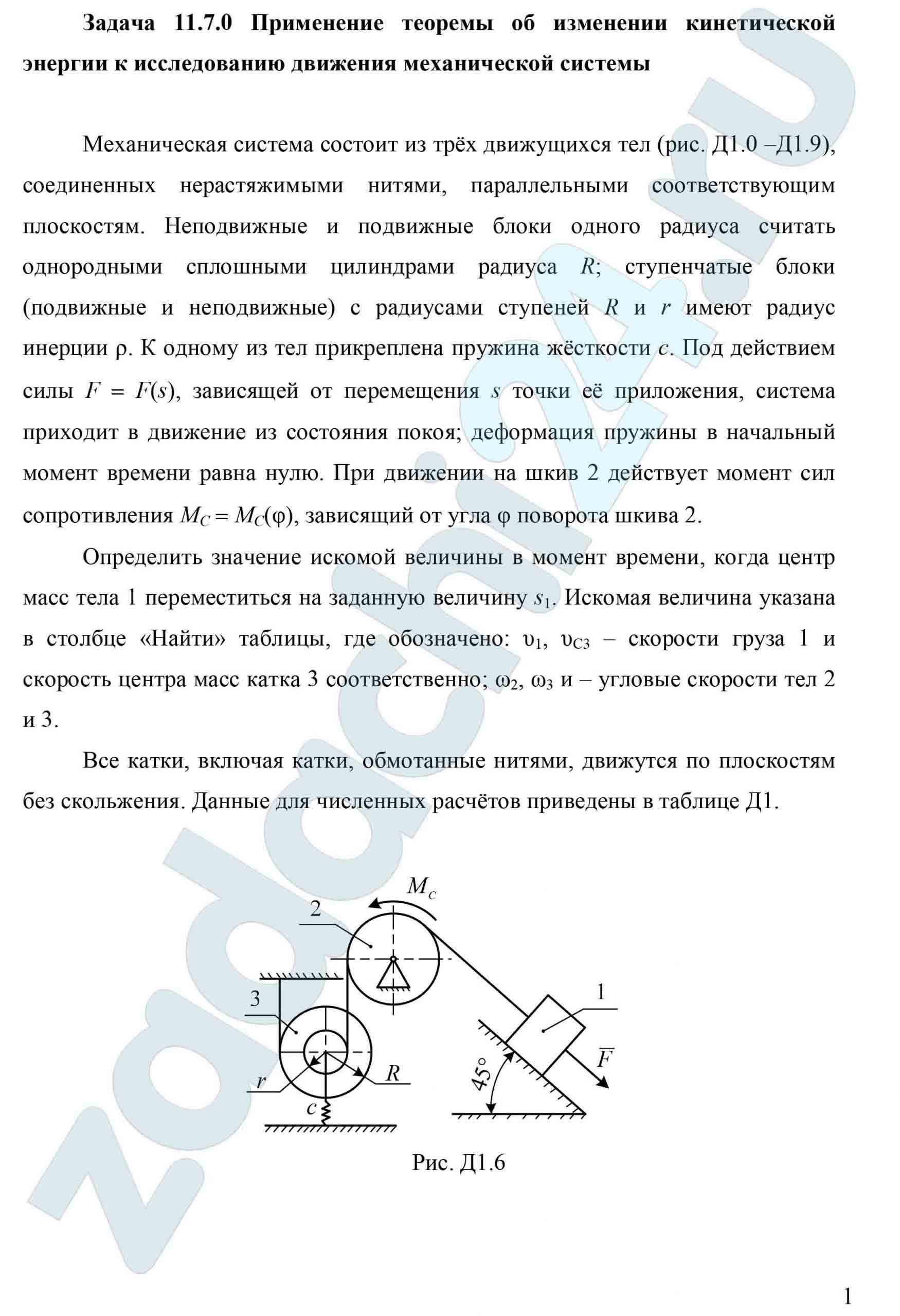
Механическая система состоит из трёх движущихся тел (рис. Д1.0 –Д1.9), соединенных нерастяжимыми нитями, параллельными соответствующим плоскостям. Неподвижные и подвижные блоки одного радиуса считать однородными сплошными цилиндрами радиуса R; ступенчатые блоки (подвижные и неподвижные) с радиусами ступеней R и r имеют радиус инерции ρ. К одному из тел прикреплена пружина жёсткости c. Под действием силы F = F(s), зависящей от перемещения s точки её приложения, система приходит в движение из состояния покоя; деформация пружины в начальный момент времени равна нулю. При движении на шкив 2 действует момент сил сопротивления MC = MC(φ), зависящий от угла φ поворота шкива 2.
Определить значение искомой величины в момент времени, когда центр масс тела 1 переместиться на заданную величину s1. Искомая величина указана в столбце «Найти» таблицы, где обозначено: υ1, υC3 – скорости груза 1 и скорость центра масс катка 3 соответственно; ω2, ω3 и – угловые скорости тел 2 и 3.
Все катки, включая катки, обмотанные нитями, движутся по плоскостям без скольжения. Данные для численных расчётов приведены в таблице Д1.
Таблица Д1
| Номер
условия |
m1, кг | m2, кг | m3, кг | с, Н/м | MC(φ), Н·м |
| 0 | 6 | 5 | 4 | 150 | 0,5 φ |
Продолжение таблицы Д1
| F = F(s), Н | ρ, м | s1, м | R, м | r, м | Найти |
| 80(4 + 4s) | 0,15 | 0,1 | 0,4 | 0,2 | υC3 |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.



ВУЗ: СамГУПС
11.8 Применение теоремы об изменении кинетической энергии к исследованию движения механической системы
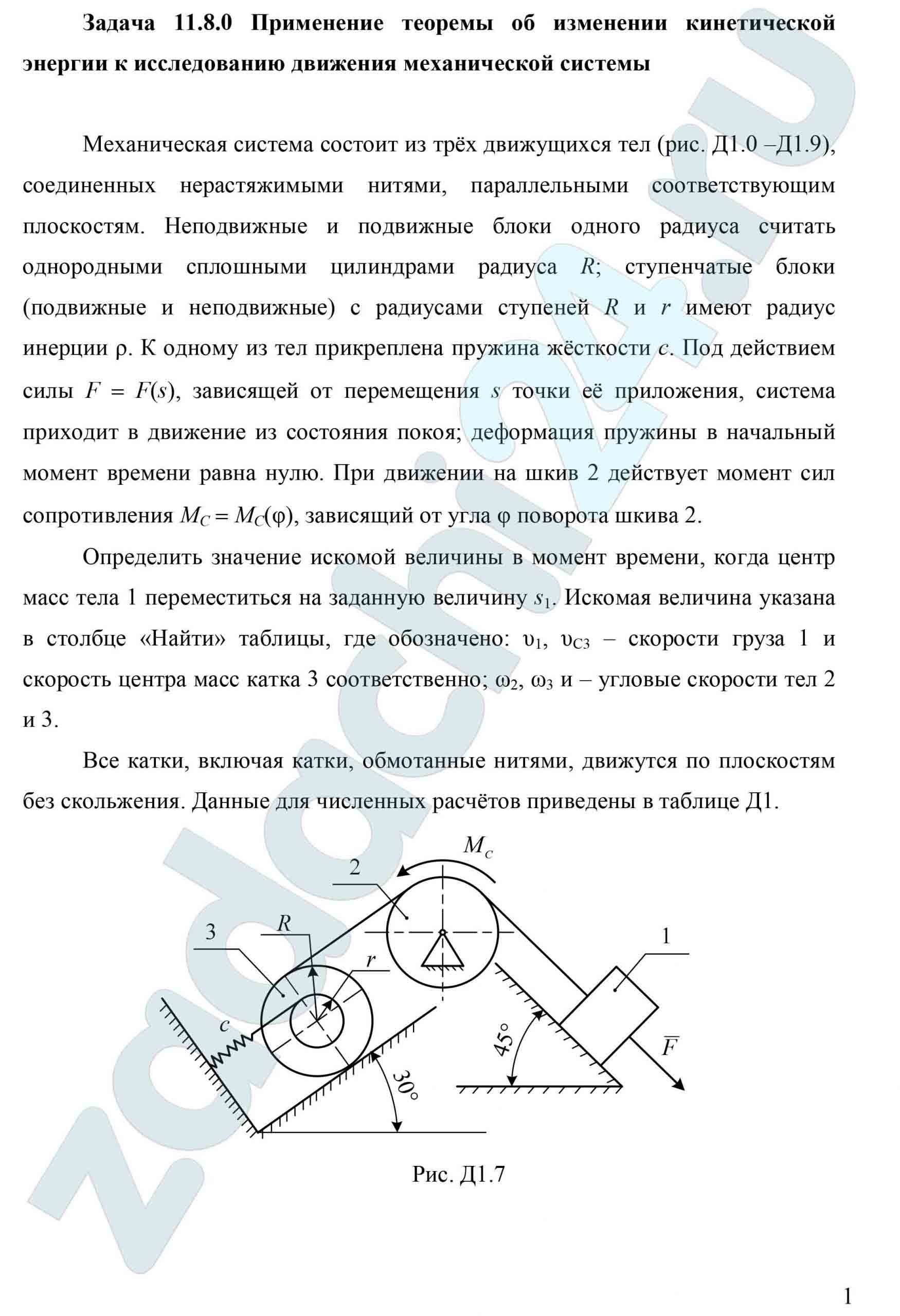
Механическая система состоит из трёх движущихся тел (рис. Д1.0 –Д1.9), соединенных нерастяжимыми нитями, параллельными соответствующим плоскостям. Неподвижные и подвижные блоки одного радиуса считать однородными сплошными цилиндрами радиуса R; ступенчатые блоки (подвижные и неподвижные) с радиусами ступеней R и r имеют радиус инерции ρ. К одному из тел прикреплена пружина жёсткости c. Под действием силы F = F(s), зависящей от перемещения s точки её приложения, система приходит в движение из состояния покоя; деформация пружины в начальный момент времени равна нулю. При движении на шкив 2 действует момент сил сопротивления MC = MC(φ), зависящий от угла φ поворота шкива 2.
Определить значение искомой величины в момент времени, когда центр масс тела 1 переместиться на заданную величину s1. Искомая величина указана в столбце «Найти» таблицы, где обозначено: υ1, υC3 – скорости груза 1 и скорость центра масс катка 3 соответственно; ω2, ω3 и – угловые скорости тел 2 и 3.
Все катки, включая катки, обмотанные нитями, движутся по плоскостям без скольжения. Данные для численных расчётов приведены в таблице Д1.
Таблица Д1
| Номер
условия |
m1, кг | m2, кг | m3, кг | с, Н/м | MC(φ), Н·м |
| 0 | 6 | 5 | 4 | 150 | 0,5 φ |
Продолжение таблицы Д1
| F = F(s), Н | ρ, м | s1, м | R, м | r, м | Найти |
| 80(4 + 4s) | 0,15 | 0,1 | 0,4 | 0,2 | υC3 |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.


ВУЗ: СамГУПС
11.9 Применение теоремы об изменении кинетической энергии к исследованию движения механической системы
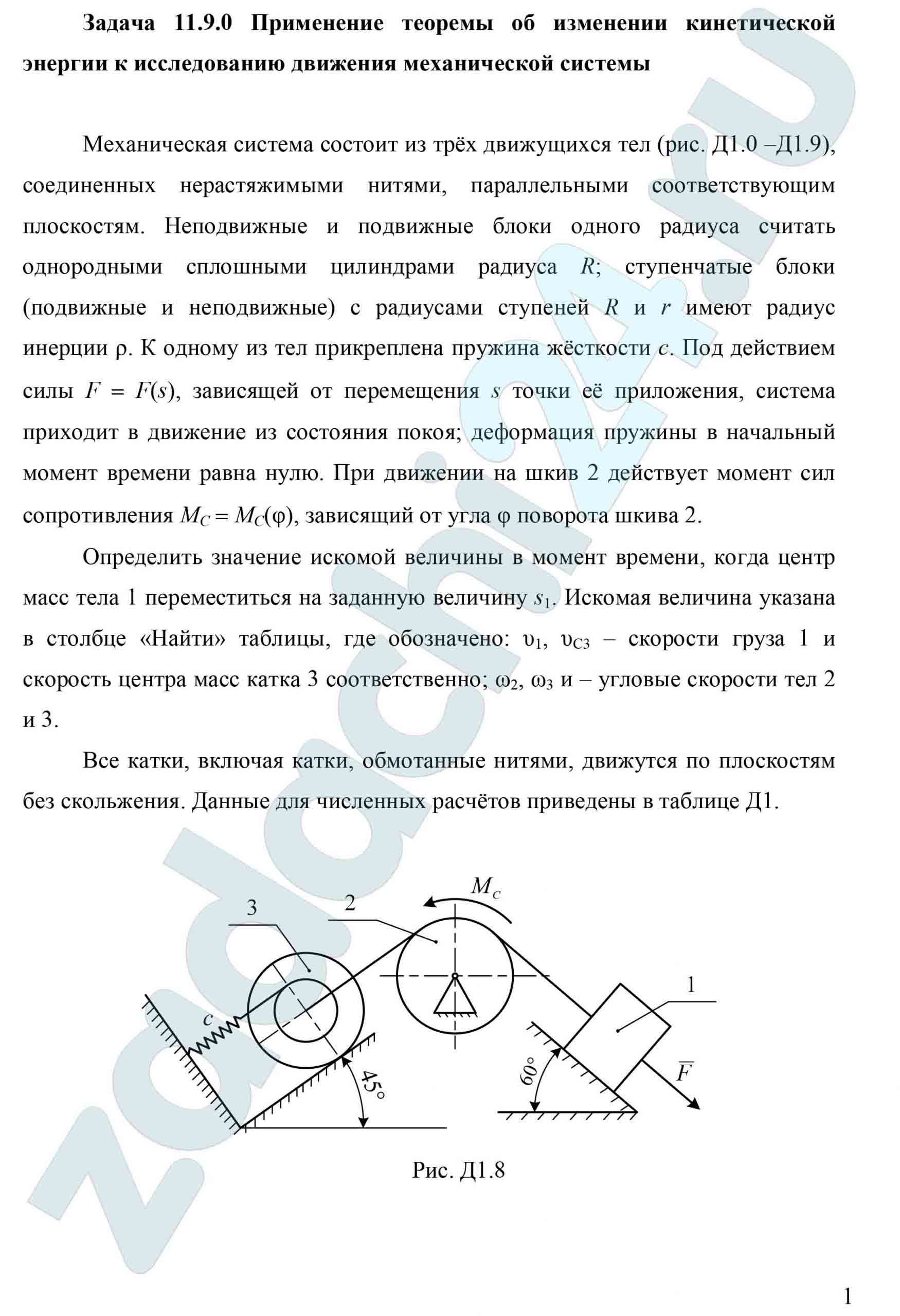
Механическая система состоит из трёх движущихся тел (рис. Д1.0 –Д1.9), соединенных нерастяжимыми нитями, параллельными соответствующим плоскостям. Неподвижные и подвижные блоки одного радиуса считать однородными сплошными цилиндрами радиуса R; ступенчатые блоки (подвижные и неподвижные) с радиусами ступеней R и r имеют радиус инерции ρ. К одному из тел прикреплена пружина жёсткости c. Под действием силы F = F(s), зависящей от перемещения s точки её приложения, система приходит в движение из состояния покоя; деформация пружины в начальный момент времени равна нулю. При движении на шкив 2 действует момент сил сопротивления MC = MC(φ), зависящий от угла φ поворота шкива 2.
Определить значение искомой величины в момент времени, когда центр масс тела 1 переместиться на заданную величину s1. Искомая величина указана в столбце «Найти» таблицы, где обозначено: υ1, υC3 – скорости груза 1 и скорость центра масс катка 3 соответственно; ω2, ω3 и – угловые скорости тел 2 и 3.
Все катки, включая катки, обмотанные нитями, движутся по плоскостям без скольжения. Данные для численных расчётов приведены в таблице Д1.
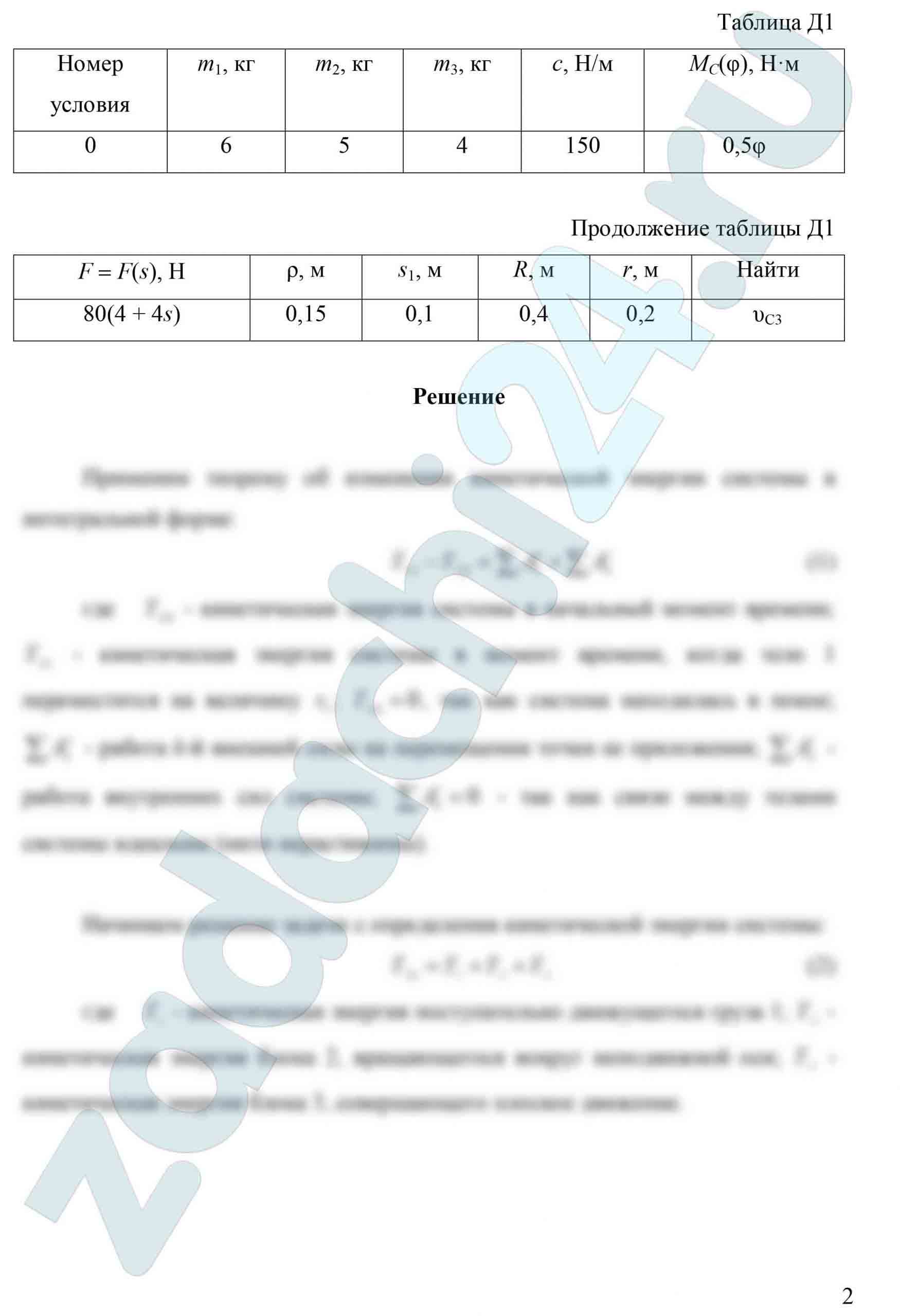
Таблица Д1
| Номер
условия |
m1, кг | m2, кг | m3, кг | с, Н/м | MC(φ), Н·м |
| 0 | 6 | 5 | 4 | 150 | 0,5 φ |
Продолжение таблицы Д1
| F = F(s), Н | ρ, м | s1, м | R, м | r, м | Найти |
| 80(4 + 4s) | 0,15 | 0,1 | 0,4 | 0,2 | υC3 |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.

ВУЗ: СамГУПС
11.10 Применение теоремы об изменении кинетической энергии к исследованию движения механической системы
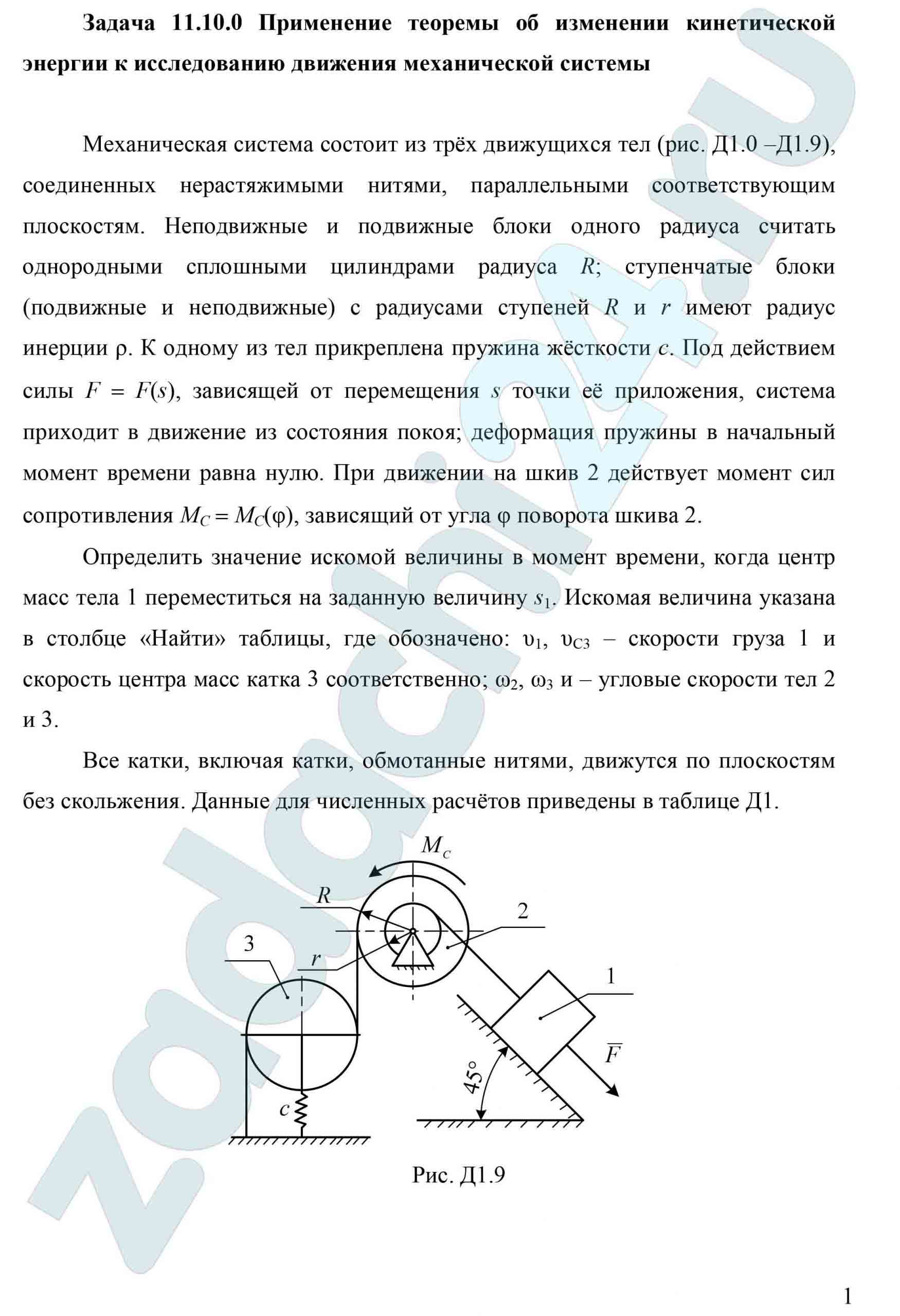
Механическая система состоит из трёх движущихся тел (рис. Д1.0 –Д1.9), соединенных нерастяжимыми нитями, параллельными соответствующим плоскостям. Неподвижные и подвижные блоки одного радиуса считать однородными сплошными цилиндрами радиуса R; ступенчатые блоки (подвижные и неподвижные) с радиусами ступеней R и r имеют радиус инерции ρ. К одному из тел прикреплена пружина жёсткости c. Под действием силы F = F(s), зависящей от перемещения s точки её приложения, система приходит в движение из состояния покоя; деформация пружины в начальный момент времени равна нулю. При движении на шкив 2 действует момент сил сопротивления MC = MC(φ), зависящий от угла φ поворота шкива 2.
Определить значение искомой величины в момент времени, когда центр масс тела 1 переместиться на заданную величину s1. Искомая величина указана в столбце «Найти» таблицы, где обозначено: υ1, υC3 – скорости груза 1 и скорость центра масс катка 3 соответственно; ω2, ω3 и – угловые скорости тел 2 и 3.
Все катки, включая катки, обмотанные нитями, движутся по плоскостям без скольжения. Данные для численных расчётов приведены в таблице Д1.
Таблица Д1
| Номер
условия |
m1, кг | m2, кг | m3, кг | с, Н/м | MC(φ), Н·м |
| 0 | 6 | 5 | 4 | 150 | 0,5 φ |
Продолжение таблицы Д1
| F = F(s), Н | ρ, м | s1, м | R, м | r, м | Найти |
| 80(4 + 4s) | 0,15 | 0,1 | 0,4 | 0,2 | υC3 |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.



ВУЗ: СамГУПС
