Мустафаев Ю.К. Червинский В.П. Теоретическая механика СамГУПС Самара 2020
7.10 Кинематика плоских механизмов
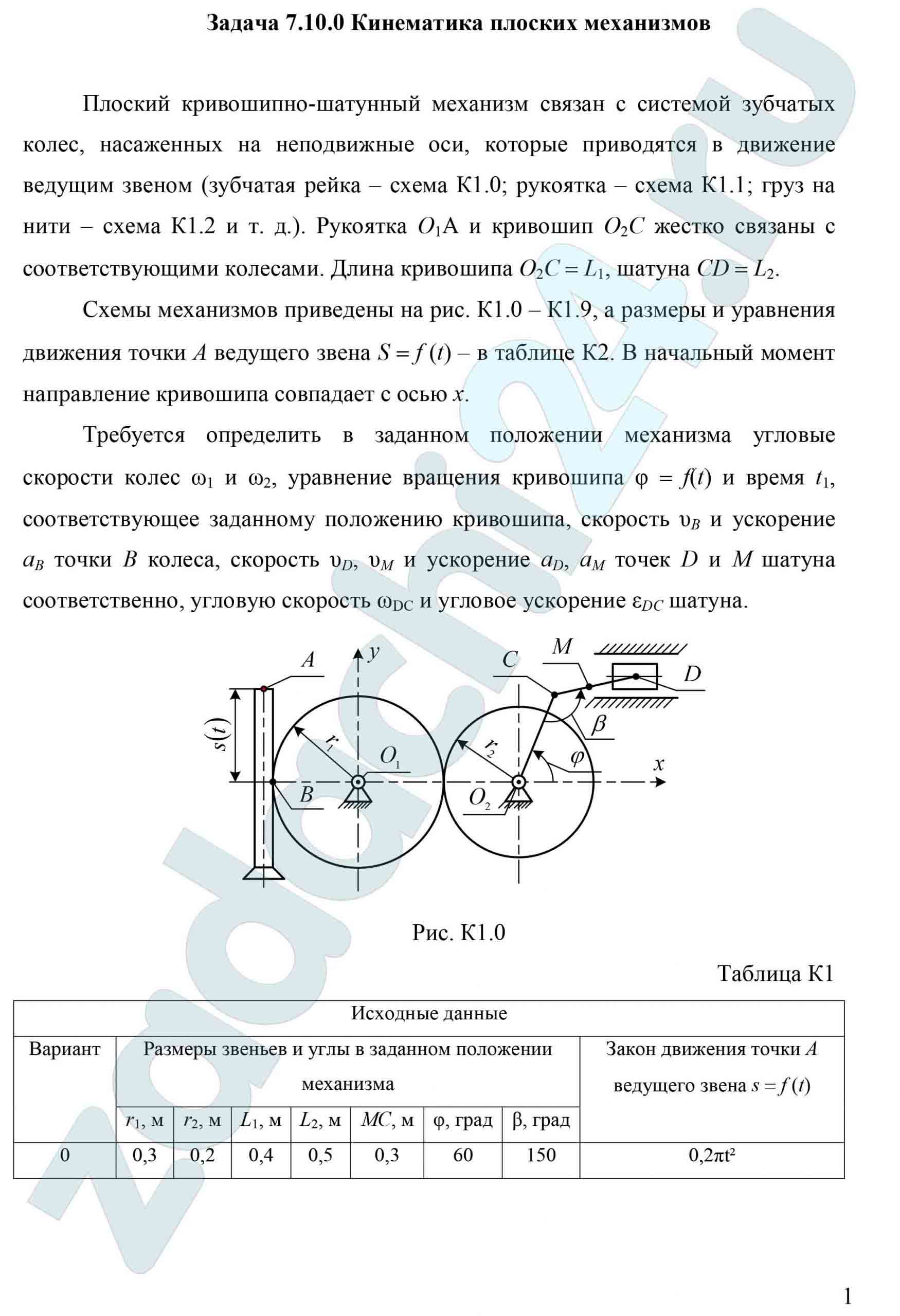
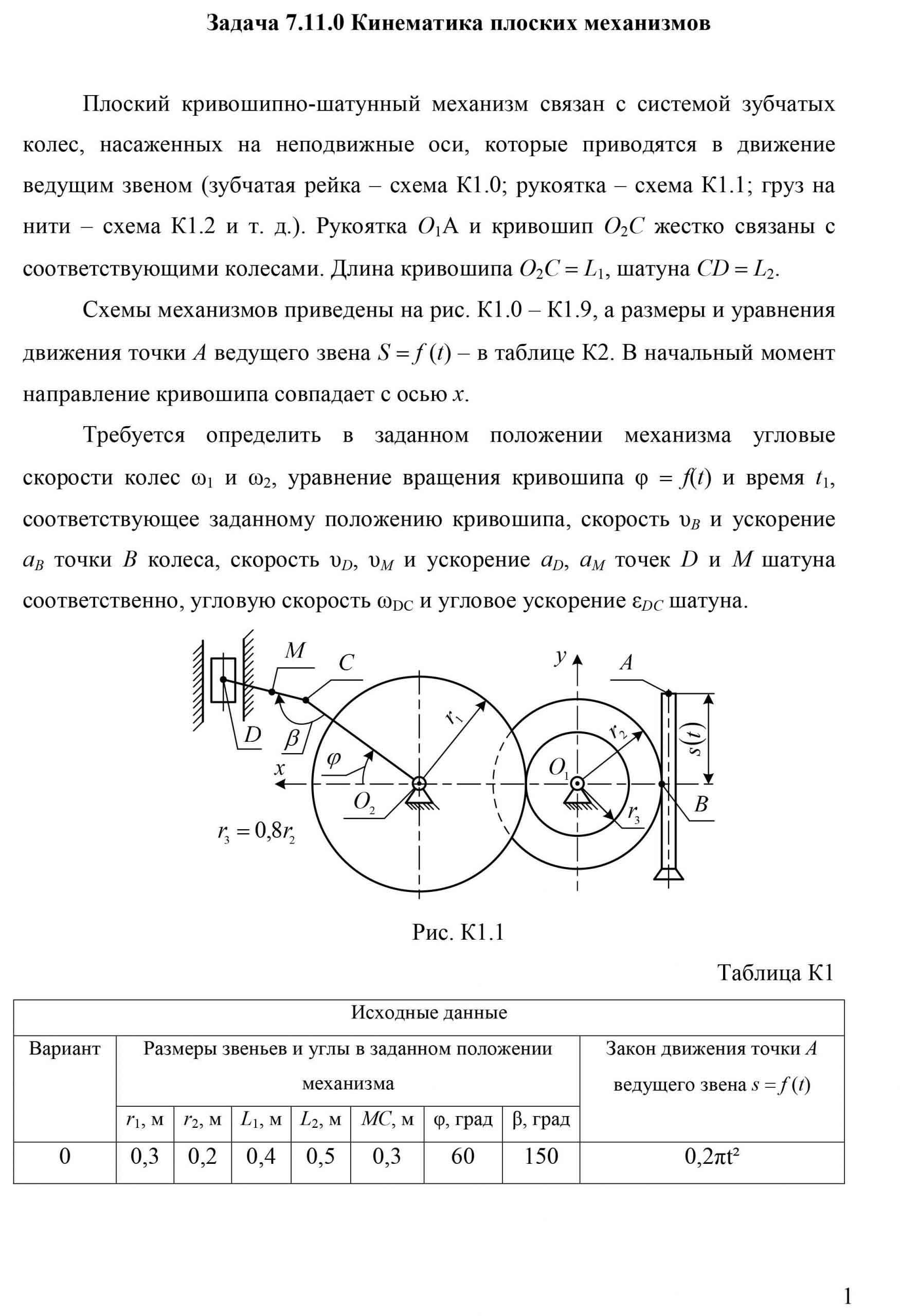
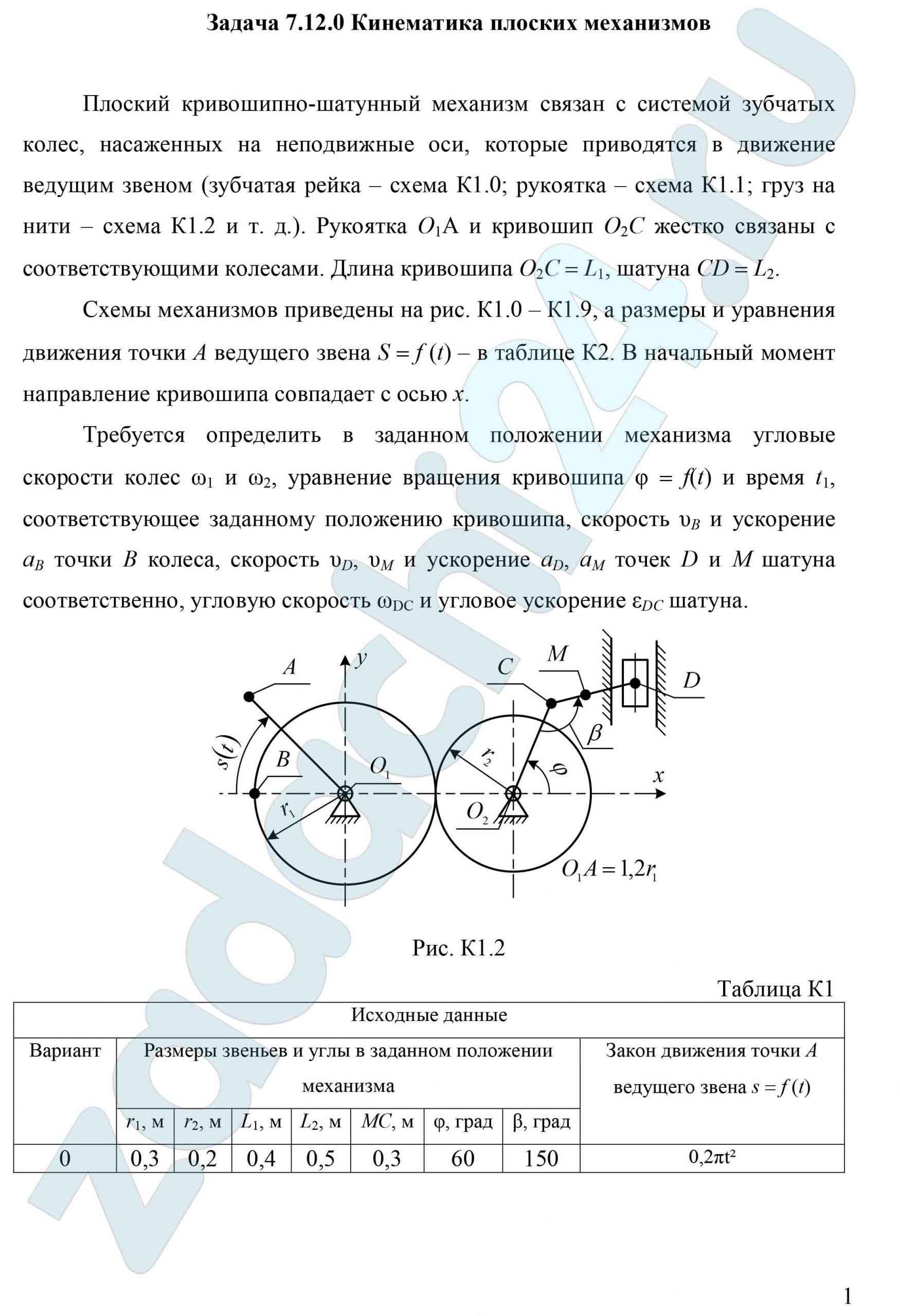
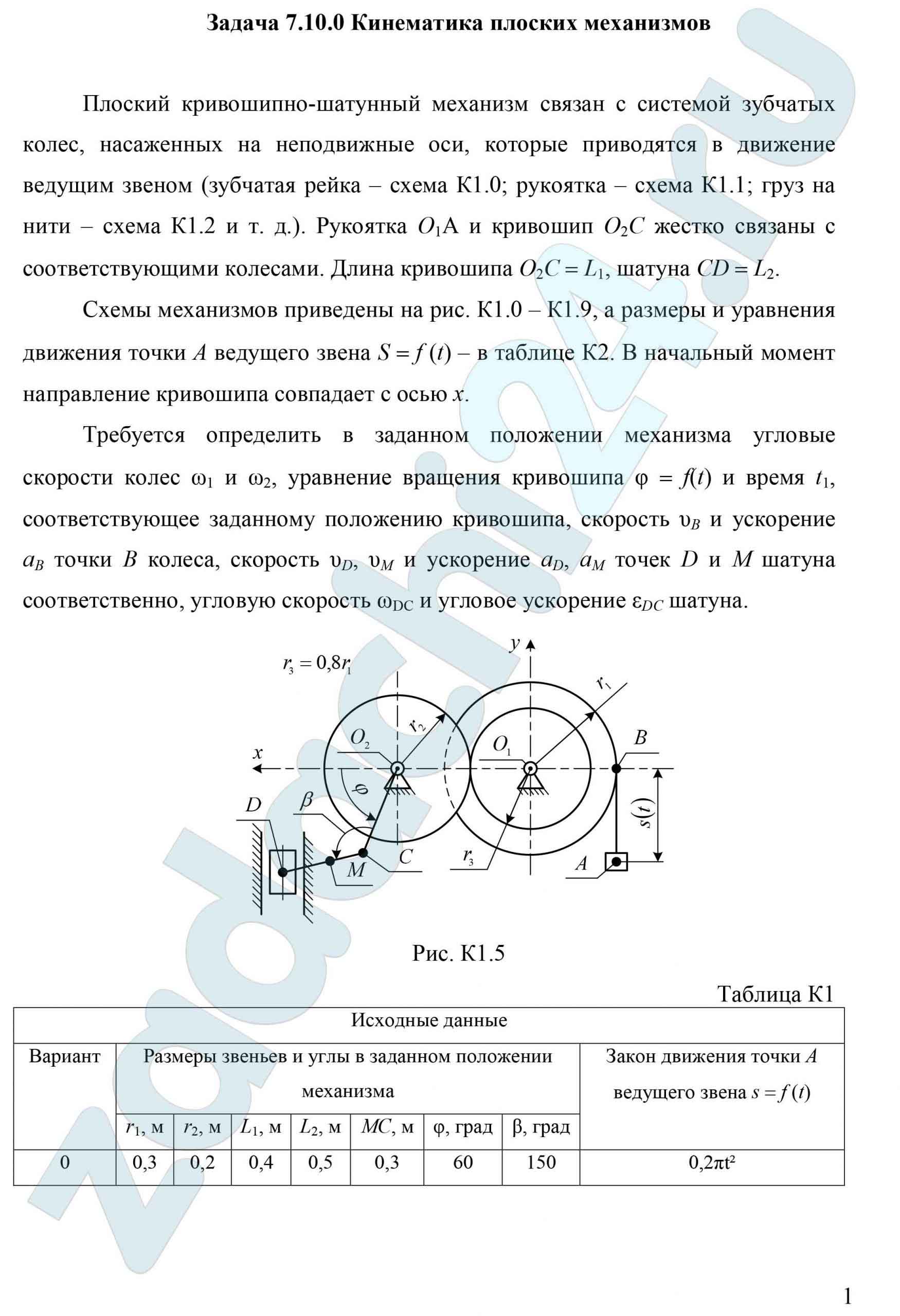
Плоский кривошипно-шатунный механизм связан с системой зубчатых колес, насаженных на неподвижные оси, которые приводятся в движение ведущим звеном (зубчатая рейка – схема К1.0; рукоятка – схема К1.1; груз на нити – схема К1.2 и т. д.). Рукоятка О1А и кривошип О2С жестко связаны с соответствующими колесами. Длина кривошипа О2С = L1, шатуна CD = L2.
Схемы механизмов приведены на рис. К1.0 – К1.9, а размеры и уравнения движения точки А ведущего звена S = f (t) – в таблице К2. В начальный момент направление кривошипа совпадает с осью x.
Требуется определить в заданном положении механизма угловые скорости колес ω1 и ω2, уравнение вращения кривошипа φ = f(t) и время t1, соответствующее заданному положению кривошипа, скорость υВ и ускорение аВ точки В колеса, скорость υD, υM и ускорение аD, аM точек D и М шатуна соответственно, угловую скорость ωDC и угловое ускорение εDC шатуна.
Таблица К1
| Номер условия 0 | |||||||
| Исходные данные | |||||||
| Размеры звеньев и углы в заданном положении механизма | Закон движения точки А ведущего звена s = f (t) | ||||||
| r1, м | r2, м | L1, м | L2, м | МС, м | φ, град | β, град | |
| 0,3 | 0,2 | 0,4 | 0,5 | 0,3 | 60 | 150 | 0,2πt² |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.

ВУЗ: СамГУПС
7.11 Кинематика плоских механизмов
Плоский кривошипно-шатунный механизм связан с системой зубчатых колес, насаженных на неподвижные оси, которые приводятся в движение ведущим звеном (зубчатая рейка – схема К1.0; рукоятка – схема К1.1; груз на нити – схема К1.2 и т. д.). Рукоятка О1А и кривошип О2С жестко связаны с соответствующими колесами. Длина кривошипа О2С = L1, шатуна CD = L2.
Схемы механизмов приведены на рис. К1.0 – К1.9, а размеры и уравнения движения точки А ведущего звена S = f (t) – в таблице К2. В начальный момент направление кривошипа совпадает с осью x.
Требуется определить в заданном положении механизма угловые скорости колес ω1 и ω2, уравнение вращения кривошипа φ = f(t) и время t1, соответствующее заданному положению кривошипа, скорость υВ и ускорение аВ точки В колеса, скорость υD, υM и ускорение аD, аM точек D и М шатуна соответственно, угловую скорость ωDC и угловое ускорение εDC шатуна.
Таблица К1
| Номер условия 0 | |||||||
| Исходные данные | |||||||
| Размеры звеньев и углы в заданном положении механизма | Закон движения точки А ведущего звена s = f (t) | ||||||
| r1, м | r2, м | L1, м | L2, м | МС, м | φ, град | β, град | |
| 0,3 | 0,2 | 0,4 | 0,5 | 0,3 | 60 | 150 | 0,2πt² |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.




ВУЗ: СамГУПС
7.12 Кинематика плоских механизмов
Плоский кривошипно-шатунный механизм связан с системой зубчатых колес, насаженных на неподвижные оси, которые приводятся в движение ведущим звеном (зубчатая рейка – схема К1.0; рукоятка – схема К1.1; груз на нити – схема К1.2 и т. д.). Рукоятка О1А и кривошип О2С жестко связаны с соответствующими колесами. Длина кривошипа О2С = L1, шатуна CD = L2.
Схемы механизмов приведены на рис. К1.0 – К1.9, а размеры и уравнения движения точки А ведущего звена S = f (t) – в таблице К2. В начальный момент направление кривошипа совпадает с осью x.
Требуется определить в заданном положении механизма угловые скорости колес ω1 и ω2, уравнение вращения кривошипа φ = f(t) и время t1, соответствующее заданному положению кривошипа, скорость υВ и ускорение аВ точки В колеса, скорость υD, υM и ускорение аD, аM точек D и М шатуна соответственно, угловую скорость ωDC и угловое ускорение εDC шатуна.
Таблица К1
| Номер условия 0 | |||||||
| Исходные данные | |||||||
| Размеры звеньев и углы в заданном положении механизма | Закон движения точки А ведущего звена s = f (t) | ||||||
| r1, м | r2, м | L1, м | L2, м | МС, м | φ, град | β, град | |
| 0,3 | 0,2 | 0,4 | 0,5 | 0,3 | 60 | 150 | 0,2πt² |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.



ВУЗ: СамГУПС
7.13 Кинематика плоских механизмов
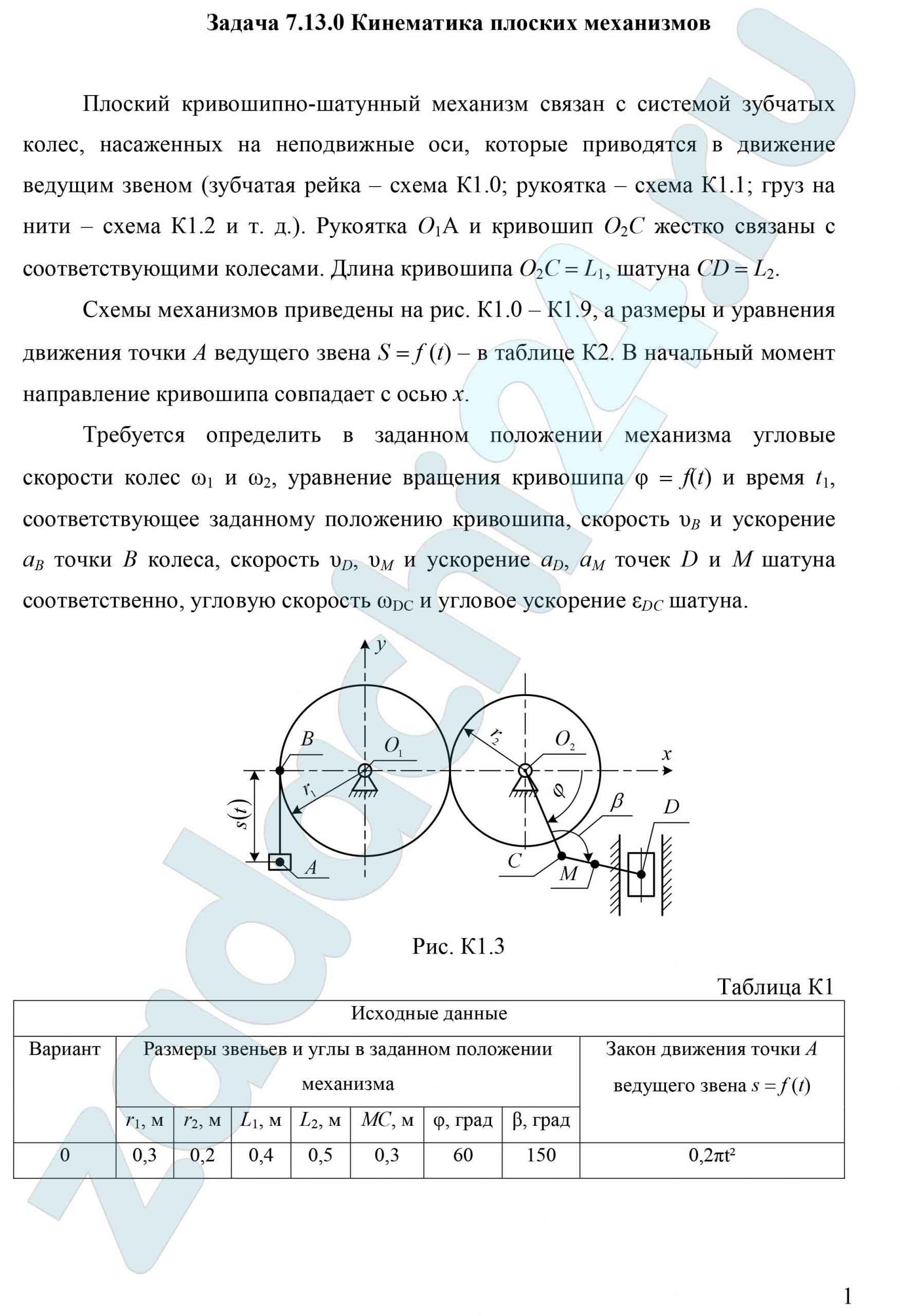
Плоский кривошипно-шатунный механизм связан с системой зубчатых колес, насаженных на неподвижные оси, которые приводятся в движение ведущим звеном (зубчатая рейка – схема К1.0; рукоятка – схема К1.1; груз на нити – схема К1.2 и т. д.). Рукоятка О1А и кривошип О2С жестко связаны с соответствующими колесами. Длина кривошипа О2С = L1, шатуна CD = L2.
Схемы механизмов приведены на рис. К1.0 – К1.9, а размеры и уравнения движения точки А ведущего звена S = f (t) – в таблице К2. В начальный момент направление кривошипа совпадает с осью x.
Требуется определить в заданном положении механизма угловые скорости колес ω1 и ω2, уравнение вращения кривошипа φ = f(t) и время t1, соответствующее заданному положению кривошипа, скорость υВ и ускорение аВ точки В колеса, скорость υD, υM и ускорение аD, аM точек D и М шатуна соответственно, угловую скорость ωDC и угловое ускорение εDC шатуна.
Таблица К1
| Номер условия 0 | |||||||
| Исходные данные | |||||||
| Размеры звеньев и углы в заданном положении механизма | Закон движения точки А ведущего звена s = f (t) | ||||||
| r1, м | r2, м | L1, м | L2, м | МС, м | φ, град | β, град | |
| 0,3 | 0,2 | 0,4 | 0,5 | 0,3 | 60 | 150 | 0,2πt² |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.




ВУЗ: СамГУПС
7.14 Кинематика плоских механизмов
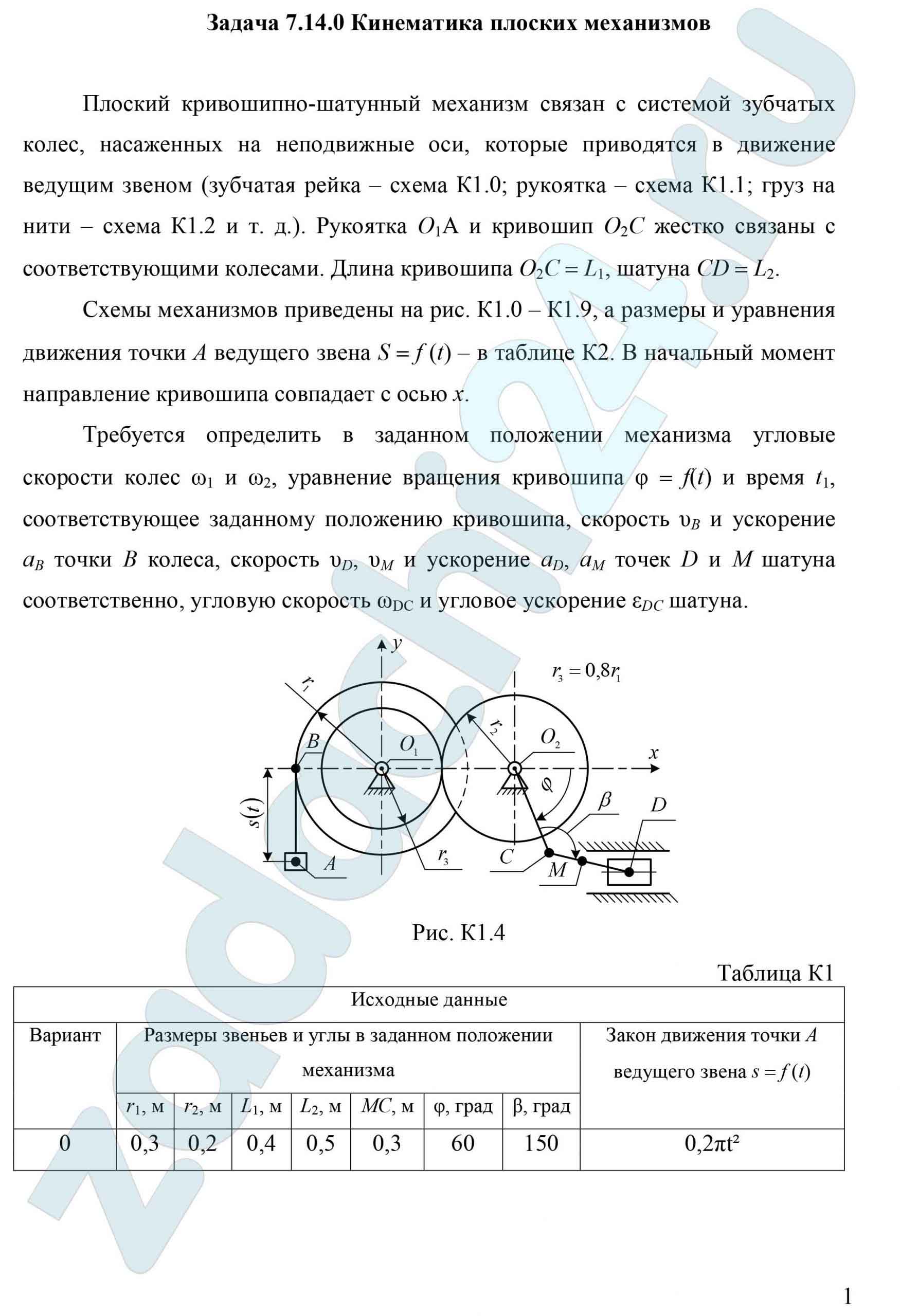
Плоский кривошипно-шатунный механизм связан с системой зубчатых колес, насаженных на неподвижные оси, которые приводятся в движение ведущим звеном (зубчатая рейка – схема К1.0; рукоятка – схема К1.1; груз на нити – схема К1.2 и т. д.). Рукоятка О1А и кривошип О2С жестко связаны с соответствующими колесами. Длина кривошипа О2С = L1, шатуна CD = L2.
Схемы механизмов приведены на рис. К1.0 – К1.9, а размеры и уравнения движения точки А ведущего звена S = f (t) – в таблице К2. В начальный момент направление кривошипа совпадает с осью x.
Требуется определить в заданном положении механизма угловые скорости колес ω1 и ω2, уравнение вращения кривошипа φ = f(t) и время t1, соответствующее заданному положению кривошипа, скорость υВ и ускорение аВ точки В колеса, скорость υD, υM и ускорение аD, аM точек D и М шатуна соответственно, угловую скорость ωDC и угловое ускорение εDC шатуна.
Таблица К1
| Номер условия 0 | |||||||
| Исходные данные | |||||||
| Размеры звеньев и углы в заданном положении механизма | Закон движения точки А ведущего звена s = f (t) | ||||||
| r1, м | r2, м | L1, м | L2, м | МС, м | φ, град | β, град | |
| 0,3 | 0,2 | 0,4 | 0,5 | 0,3 | 60 | 150 | 0,2πt² |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.


ВУЗ: СамГУПС
7.15 Кинематика плоских механизмов
Плоский кривошипно-шатунный механизм связан с системой зубчатых колес, насаженных на неподвижные оси, которые приводятся в движение ведущим звеном (зубчатая рейка – схема К1.0; рукоятка – схема К1.1; груз на нити – схема К1.2 и т. д.). Рукоятка О1А и кривошип О2С жестко связаны с соответствующими колесами. Длина кривошипа О2С = L1, шатуна CD = L2.
Схемы механизмов приведены на рис. К1.0 – К1.9, а размеры и уравнения движения точки А ведущего звена S = f (t) – в таблице К2. В начальный момент направление кривошипа совпадает с осью x.
Требуется определить в заданном положении механизма угловые скорости колес ω1 и ω2, уравнение вращения кривошипа φ = f(t) и время t1, соответствующее заданному положению кривошипа, скорость υВ и ускорение аВ точки В колеса, скорость υD, υM и ускорение аD, аM точек D и М шатуна соответственно, угловую скорость ωDC и угловое ускорение εDC шатуна.
Таблица К1
| Исходные данные | ||||||||
| Вариант | Размеры звеньев и углы в заданном положении механизма | Закон движения точки А ведущего звена s = f (t) | ||||||
| r1, м | r2, м | L1, м | L2, м | МС, м | φ, град | β, град | ||
| 0 | 0,3 | 0,2 | 0,4 | 0,5 | 0,3 | 60 | 150 | 0,2πt² |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.



ВУЗ: СамГУПС
7.16 Кинематика плоских механизмов
Плоский кривошипно-шатунный механизм связан с системой зубчатых колес, насаженных на неподвижные оси, которые приводятся в движение ведущим звеном (зубчатая рейка – схема К1.0; рукоятка – схема К1.1; груз на нити – схема К1.2 и т. д.). Рукоятка О1А и кривошип О2С жестко связаны с соответствующими колесами. Длина кривошипа О2С = L1, шатуна CD = L2.
Схемы механизмов приведены на рис. К1.0 – К1.9, а размеры и уравнения движения точки А ведущего звена S = f (t) – в таблице К2. В начальный момент направление кривошипа совпадает с осью x.
Требуется определить в заданном положении механизма угловые скорости колес ω1 и ω2, уравнение вращения кривошипа φ = f(t) и время t1, соответствующее заданному положению кривошипа, скорость υВ и ускорение аВ точки В колеса, скорость υD, υM и ускорение аD, аM точек D и М шатуна соответственно, угловую скорость ωDC и угловое ускорение εDC шатуна.
Таблица К1
| Исходные данные | ||||||||
| Вариант | Размеры звеньев и углы в заданном положении механизма | Закон движения точки А ведущего звена s = f (t) | ||||||
| r1, м | r2, м | L1, м | L2, м | МС, м | φ, град | β, град | ||
| 0 | 0,3 | 0,2 | 0,4 | 0,5 | 0,3 | 60 | 150 | 0,2πt² |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.


ВУЗ: СамГУПС
7.17 Кинематика плоских механизмов
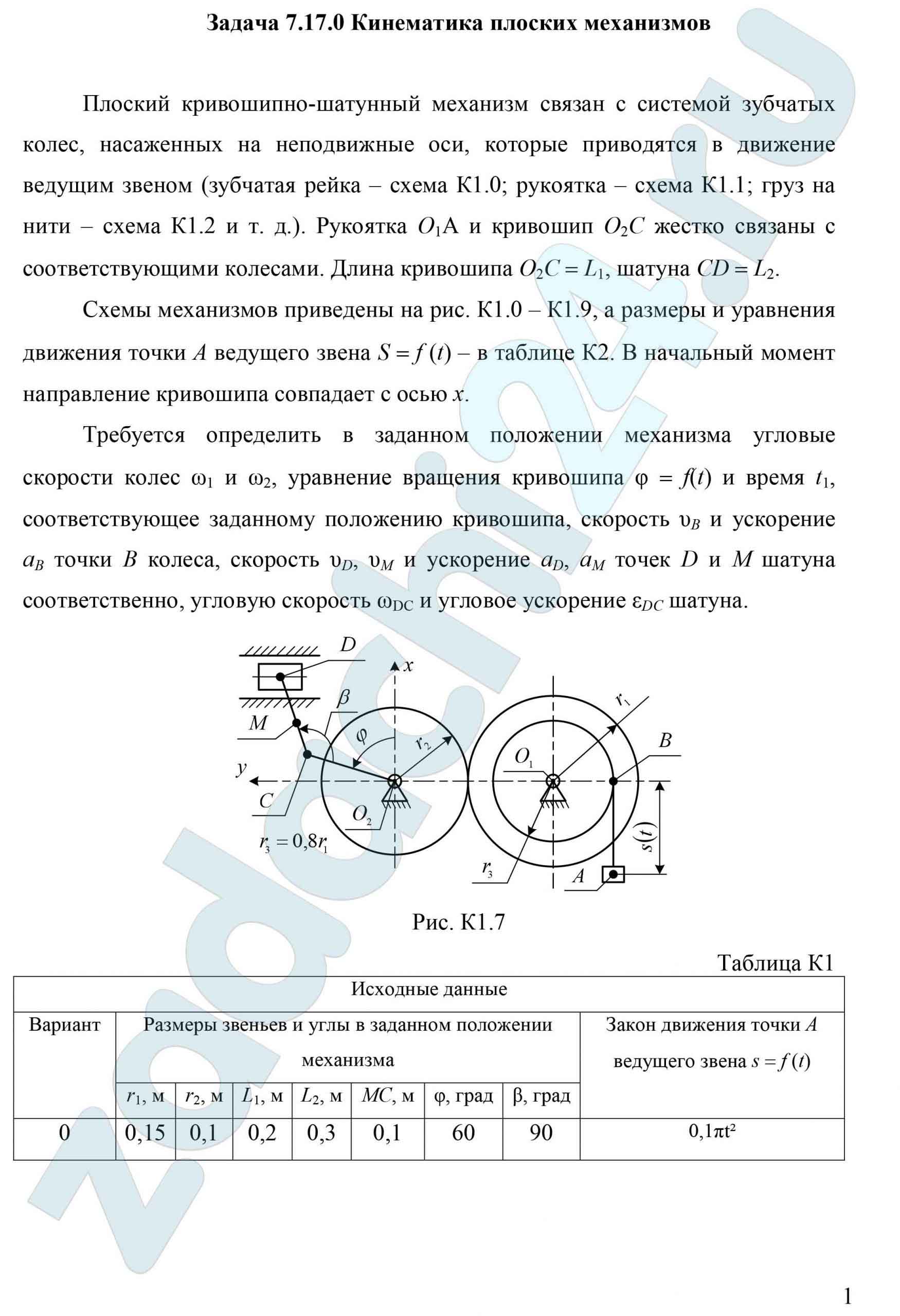
Плоский кривошипно-шатунный механизм связан с системой зубчатых колес, насаженных на неподвижные оси, которые приводятся в движение ведущим звеном (зубчатая рейка – схема К1.0; рукоятка – схема К1.1; груз на нити – схема К1.2 и т. д.). Рукоятка О1А и кривошип О2С жестко связаны с соответствующими колесами. Длина кривошипа О2С = L1, шатуна CD = L2.
Схемы механизмов приведены на рис. К1.0 – К1.9, а размеры и уравнения движения точки А ведущего звена S = f (t) – в таблице К2. В начальный момент направление кривошипа совпадает с осью x.
Требуется определить в заданном положении механизма угловые скорости колес ω1 и ω2, уравнение вращения кривошипа φ = f(t) и время t1, соответствующее заданному положению кривошипа, скорость υВ и ускорение аВ точки В колеса, скорость υD, υM и ускорение аD, аM точек D и М шатуна соответственно, угловую скорость ωDC и угловое ускорение εDC шатуна.
Таблица К1
| Исходные данные | ||||||||
| Вариант | Размеры звеньев и углы в заданном положении механизма | Закон движения точки А ведущего звена s = f (t) | ||||||
| r1, м | r2, м | L1, м | L2, м | МС, м | φ, град | β, град | ||
| 0 | 0,3 | 0,2 | 0,4 | 0,5 | 0,3 | 60 | 150 | 0,2πt² |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.


ВУЗ: СамГУПС
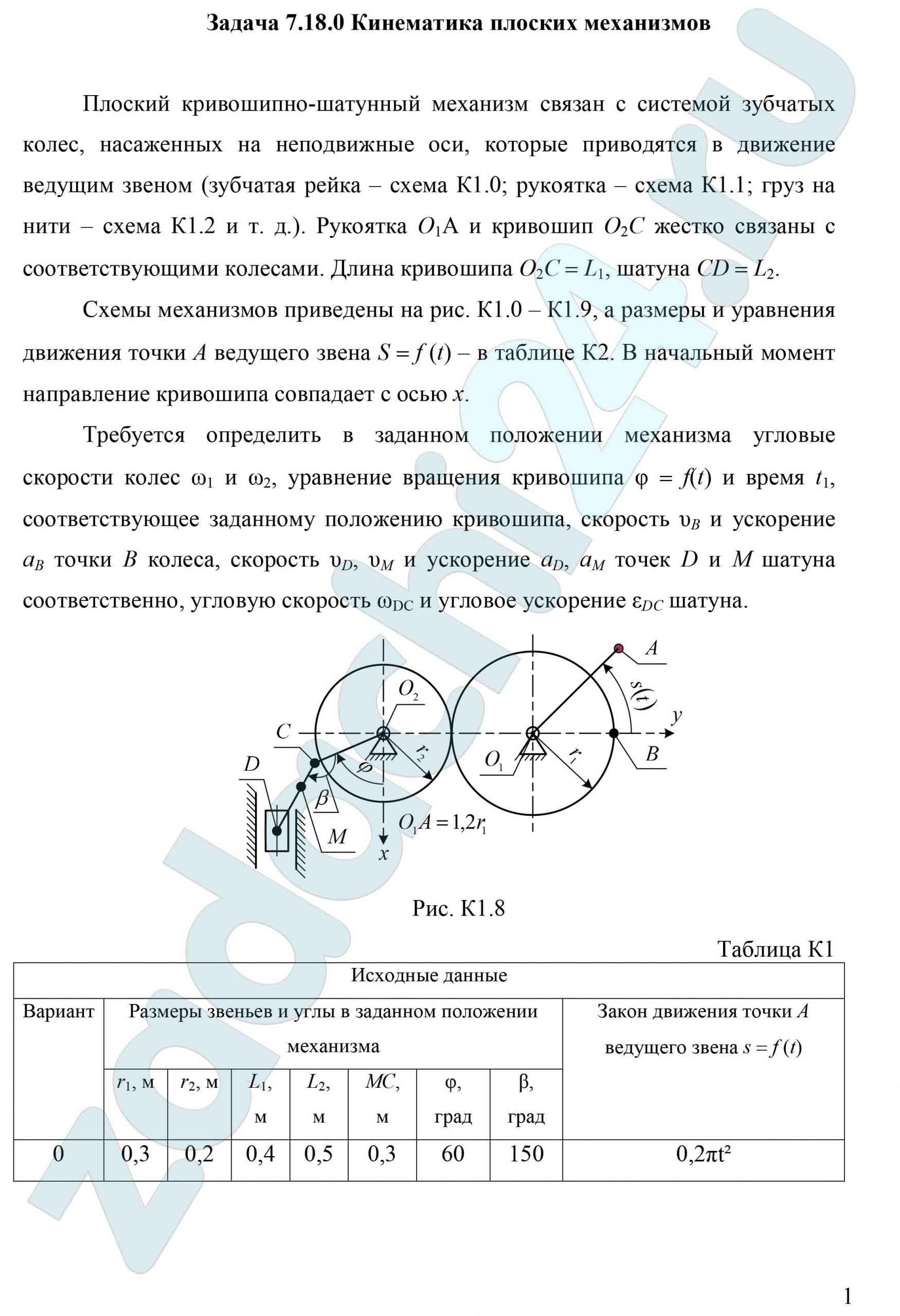
7.18 Кинематика плоских механизмов
Плоский кривошипно-шатунный механизм связан с системой зубчатых колес, насаженных на неподвижные оси, которые приводятся в движение ведущим звеном (зубчатая рейка – схема К1.0; рукоятка – схема К1.1; груз на нити – схема К1.2 и т. д.). Рукоятка О1А и кривошип О2С жестко связаны с соответствующими колесами. Длина кривошипа О2С = L1, шатуна CD = L2.
Схемы механизмов приведены на рис. К1.0 – К1.9, а размеры и уравнения движения точки А ведущего звена S = f (t) – в таблице К2. В начальный момент направление кривошипа совпадает с осью x.
Требуется определить в заданном положении механизма угловые скорости колес ω1 и ω2, уравнение вращения кривошипа φ = f(t) и время t1, соответствующее заданному положению кривошипа, скорость υВ и ускорение аВ точки В колеса, скорость υD, υM и ускорение аD, аM точек D и М шатуна соответственно, угловую скорость ωDC и угловое ускорение εDC шатуна.
Таблица К1
| Исходные данные | ||||||||
| Вариант | Размеры звеньев и углы в заданном положении механизма | Закон движения точки А ведущего звена s = f (t) | ||||||
| r1, м | r2, м | L1, м | L2, м | МС, м | φ, град | β, град | ||
| 0 | 0,3 | 0,2 | 0,4 | 0,5 | 0,3 | 60 | 150 | 0,2πt² |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.



ВУЗ: СамГУПС
7.19 Кинематика плоских механизмов
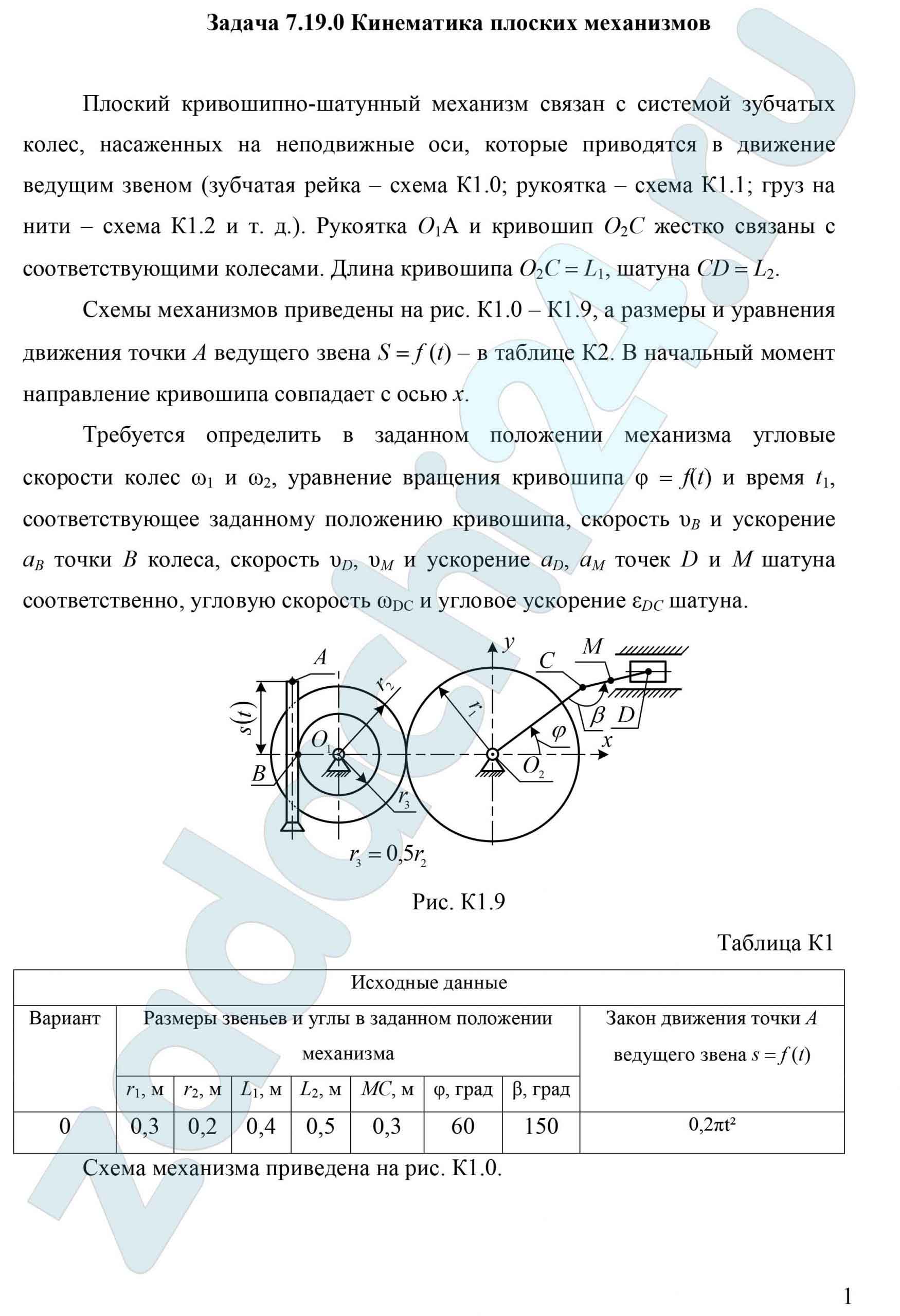
Плоский кривошипно-шатунный механизм связан с системой зубчатых колес, насаженных на неподвижные оси, которые приводятся в движение ведущим звеном (зубчатая рейка – схема К1.0; рукоятка – схема К1.1; груз на нити – схема К1.2 и т. д.). Рукоятка О1А и кривошип О2С жестко связаны с соответствующими колесами. Длина кривошипа О2С = L1, шатуна CD = L2.
Схемы механизмов приведены на рис. К1.0 – К1.9, а размеры и уравнения движения точки А ведущего звена S = f (t) – в таблице К2. В начальный момент направление кривошипа совпадает с осью x.
Требуется определить в заданном положении механизма угловые скорости колес ω1 и ω2, уравнение вращения кривошипа φ = f(t) и время t1, соответствующее заданному положению кривошипа, скорость υВ и ускорение аВ точки В колеса, скорость υD, υM и ускорение аD, аM точек D и М шатуна соответственно, угловую скорость ωDC и угловое ускорение εDC шатуна.
Таблица К1
| Исходные данные | ||||||||
| Вариант | Размеры звеньев и углы в заданном положении механизма | Закон движения точки А ведущего звена s = f (t) | ||||||
| r1, м | r2, м | L1, м | L2, м | МС, м | φ, град | β, град | ||
| 0 | 0,3 | 0,2 | 0,4 | 0,5 | 0,3 | 60 | 150 | 0,2πt² |
Варианты задачи: 1, 2, 3, 4, 5, 6, 7, 8, 9.




ВУЗ: СамГУПС
