Теоретическая механика ИРНИТУ
7.3 Определение характеристик движения точек и тел плоского механизма
Плоский механизм, расположенный в вертикальной плоскости, состоит из стержней 1, 2, 3 катка 4 и ползуна 5, соединенных между собой и с неподвижной опорой O шарнирами (рис. K2.0 ÷ K2.9).
Качение катка 4 происходит без скольжения и отрыва от плоскости. Длины стержней l1, l2, l3, радиус катка R4 и другие необходимые для расчета размеры указаны на рисунках.
В некоторый момент времени положение движущегося механизма определяется углами α, β, γ, δ. Значения этих углов, а также величина угловой скорости ведущего звена или линейная скорость одной из точек механизма указаны в табл. K2.
Для данного положения механизма определить величины, указанные в таблице в столбце «Найти».
Таблица К2
Таблица исходных данных
| Номер условия 1 | |||||||
| Углы в градусах | Дано | Найти | |||||
| α | β | γ | δ | ω1, с-1 | VB, м/c | VС, м/c | |
| 30 | 90 | 45 | 45 | — | -1 | — | ω1, ω2, ω3, ω4,
VА, VС |


ВУЗ: ИРНИТУ
7.23 Задание K2. Определение кинематических характеристик движения твердых тел
Плоский механизм, расположенный в вертикальной плоскости, состоит из стержней 1, 2, 3 катка 4 и ползуна 5, соединенных между собой и с неподвижной опорой O шарнирами (рис. K2.0 ÷ K2.9). Качение катка 4 происходит без скольжения и отрыва от плоскости. Длины стержней l1, l2, l3, радиус катка R4 и другие необходимые для расчета размеры указаны на рисунках. В некоторый момент времени положение движущегося механизма определяется углами α, β, γ, δ. Значения этих углов, а также величина угловой скорости ведущего звена или линейная скорость одной из точек механизма указаны в табл. K2.
Для данного положения механизма определить величины, указанные в таблице в столбце «Найти».


ВУЗ: ИРНИТУ
15.1 Интегрирование дифференциальных уравнений движения точки, находящейся под действием постоянных сил
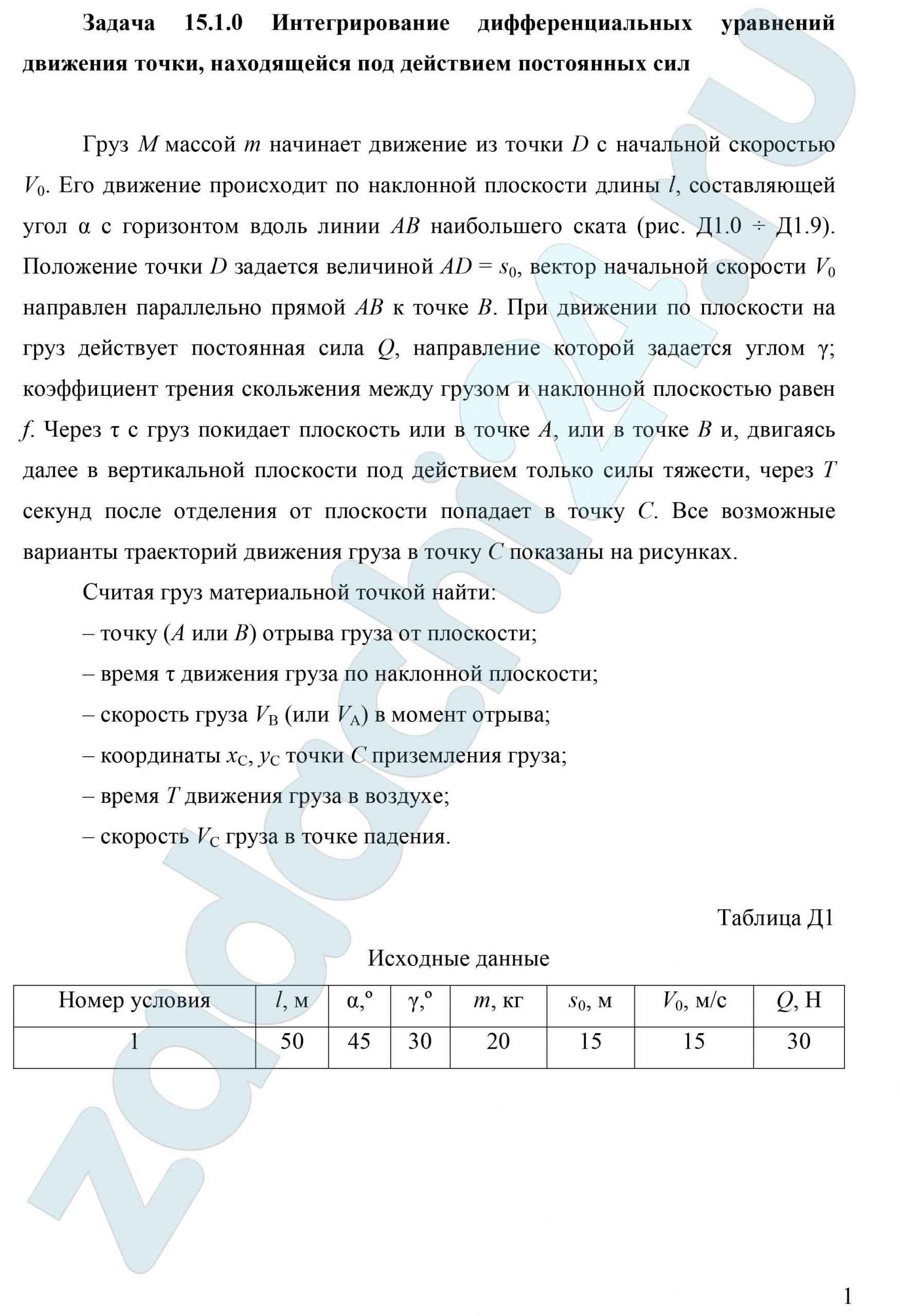
Груз М массой m начинает движение из точки D с начальной скоростью V0. Его движение происходит по наклонной плоскости длины l, составляющей угол α с горизонтом вдоль линии АВ наибольшего ската (рис. Д1.0 ÷ Д1.9). Положение точки D задается величиной AD = s0, вектор начальной скорости V0 направлен параллельно прямой АВ к точке В. При движении по плоскости на груз действует постоянная сила Q, направление которой задается углом γ; коэффициент трения скольжения между грузом и наклонной плоскостью равен f. Через τ с груз покидает плоскость или в точке A, или в точке B и, двигаясь далее в вертикальной плоскости под действием только силы тяжести, через T секунд после отделения от плоскости попадает в точку С. Все возможные варианты траекторий движения груза в точку C показаны на рисунках.
Считая груз материальной точкой найти:
– точку (А или В) отрыва груза от плоскости;
– время τ движения груза по наклонной плоскости;
– скорость груза VB (или VA) в момент отрыва;
– координаты xC, yC точки C приземления груза;
– время T движения груза в воздухе;
– скорость VC груза в точке падения.
Таблица Д1
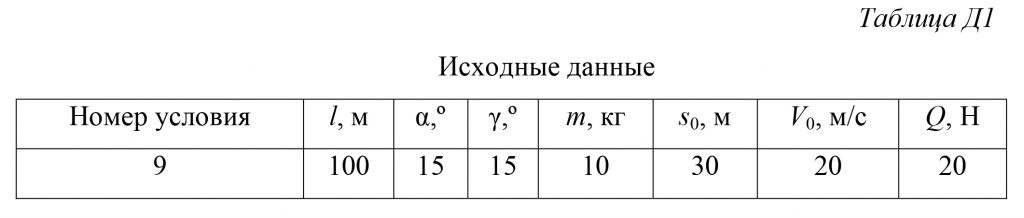
Исходные данные
| Номер условия | l, м | α,º | γ,º | m, кг | s0, м | V0, м/c | Q, Н |
| 1 | 50 | 45 | 30 | 20 | 15 | 15 | 30 |
Оформление готовой работы



ВУЗ: ИРНИТУ
15.10 Задача Д1. Интегрирование дифференциальных уравнений движения точки, находящейся под действием постоянных сил
Груз М массой m начинает движение из точки D с начальной скоростью V0. Его движение происходит по наклонной плоскости длины l, составляющей угол α с горизонтом вдоль линии АВ наибольшего ската (рис. Д1.0 ÷ Д1.9). Положение точки D задается величиной AD = s0, вектор начальной скорости V0 направлен параллельно прямой АВ к точке В. При движении по плоскости на груз действует постоянная сила Q, направление которой задается углом γ; коэффициент трения скольжения между грузом и наклонной плоскостью равен f. Через τ с груз покидает плоскость или в точке A, или в точке B и, двигаясь далее в вертикальной плоскости под действием только силы тяжести, через T секунд после отделения от плоскости попадает в точку С. Все возможные варианты траекторий движения груза в точку C показаны на рисунках.
Считая груз материальной точкой найти:
– точку (А или В) отрыва груза от плоскости;
– время τ движения груза по наклонной плоскости;
– скорость груза VB (или VA) в момент отрыва;
– координаты xC, yC точки C приземления груза;
– время T движения груза в воздухе;
– скорость VC груза в точке падения.
Необходимые данные приведены на рисунках и в табл. Д1.

ВУЗ: ИРНИТУ
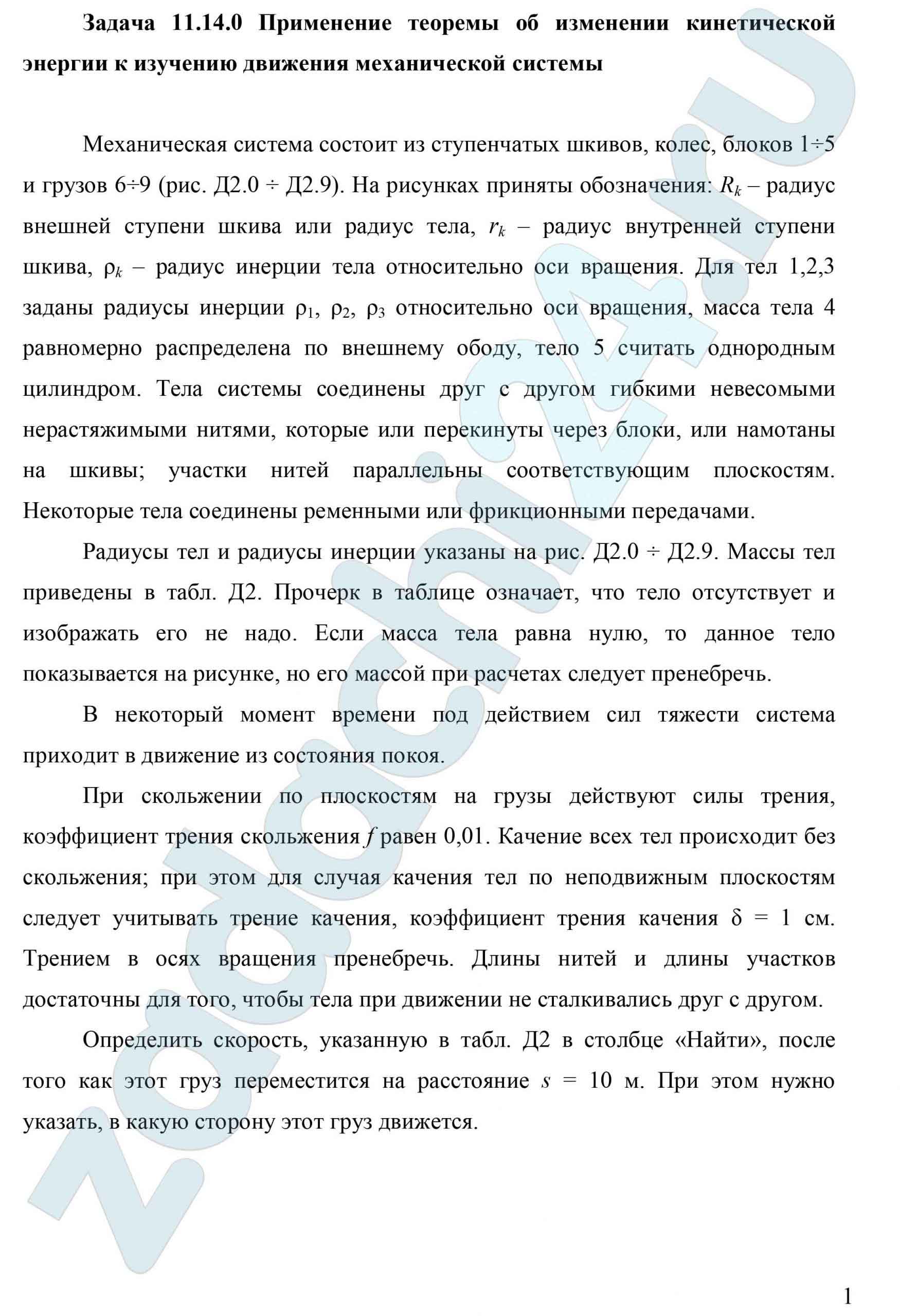
11.14 Применение теоремы об изменении кинетической энергии к изучению движения механической системы
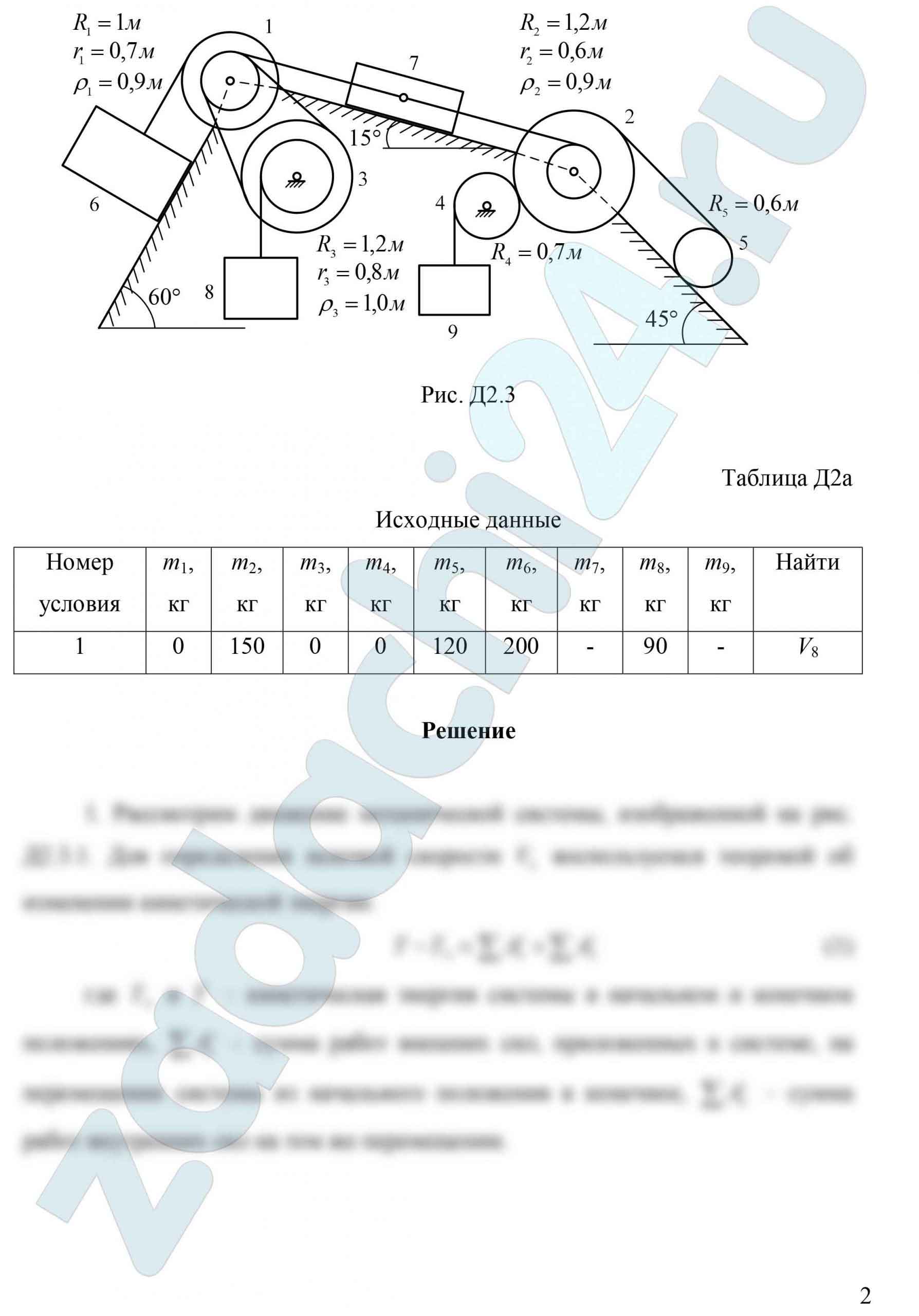
Механическая система состоит из ступенчатых шкивов, колес, блоков 1÷5 и грузов 6÷9 (рис. Д2.0 ÷ Д2.9). На рисунках приняты обозначения: Rk – радиус внешней ступени шкива или радиус тела, rk – радиус внутренней ступени шкива, ρk – радиус инерции тела относительно оси вращения. Для тел 1,2,3 заданы радиусы инерции ρ1, ρ2, ρ3 относительно оси вращения, масса тела 4 равномерно распределена по внешнему ободу, тело 5 считать однородным цилиндром. Тела системы соединены друг с другом гибкими невесомыми нерастяжимыми нитями, которые или перекинуты через блоки, или намотаны на шкивы; участки нитей параллельны соответствующим плоскостям. Некоторые тела соединены ременными или фрикционными передачами.
Радиусы тел и радиусы инерции указаны на рис. Д2.0 ÷ Д2.9. Массы тел приведены в табл. Д2. Прочерк в таблице означает, что тело отсутствует и изображать его не надо. Если масса тела равна нулю, то данное тело показывается на рисунке, но его массой при расчетах следует пренебречь.
В некоторый момент времени под действием сил тяжести система приходит в движение из состояния покоя.
При скольжении по плоскостям на грузы действуют силы трения, коэффициент трения скольжения f равен 0,01. Качение всех тел происходит без скольжения; при этом для случая качения тел по неподвижным плоскостям следует учитывать трение качения, коэффициент трения качения δ = 1 см. Трением в осях вращения пренебречь. Длины нитей и длины участков достаточны для того, чтобы тела при движении не сталкивались друг с другом.
Определить скорость, указанную в табл. Д2 в столбце «Найти», после того как этот груз переместится на расстояние s = 10 м. При этом нужно указать, в какую сторону этот груз движется.
Таблица Д2а
Исходные данные
| Номер условия 1 | ||||
| m1, кг | m2, кг | m3, кг | m4, кг | m5, кг |
| 0 | 150 | 0 | 0 | 120 |
| m6, кг | m7, кг | m8, кг | m9, кг | Найти |
| 200 | — | 90 | — | V8 |
Оформление готовой работы







ВУЗ: ИРНИТУ
