7.9 Кинематический анализ плоского механизма
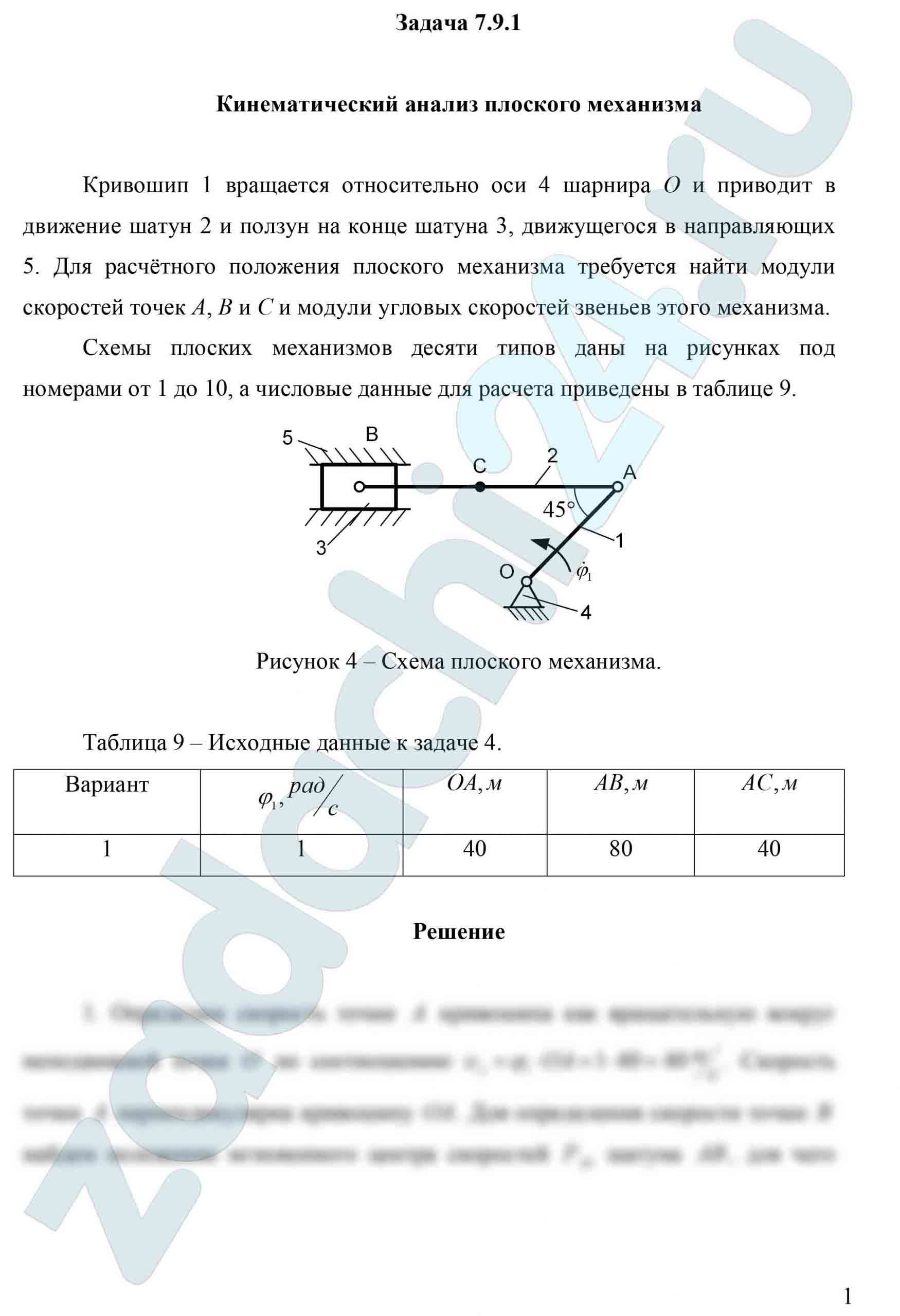
Кривошип 1 вращается относительно оси 4 шарнира О и приводит в движение шатун 2 и ползун на конце шатуна 3, движущегося в направляющих 5. Для расчётного положения плоского механизма требуется найти модули скоростей точек А, В и С и модули угловых скоростей звеньев этого механизма.
Схемы плоских механизмов десяти типов даны на рисунках под номерами от 1 до 10, а числовые данные для расчета приведены в таблице 9.
Таблица 9 – Исходные данные к задаче 4
| Вариант | φ1, рад/с | ОА, м | АВ, м | АС, м |
| 1 | 1 | 40 | 80 | 40 |
Варианты задачи: 6.
ВУЗ: РГАЗУ

