7.4 Плоский механизм состоит из стержней 1, 2, 3, 4 и ползуна В или Е (рис.0–7) или из стержней 1, 2, 3 и ползунов В и Е (рис.8,9), соединённых друг с другом и с неподвижными опорами О1, О2 шарнирами; точка D находится в середине стержня AB. l1=0,4 м, l2=1,2 м, l3=1,4 м, l4=0,6 м. Положение механизма определяется α, β, γ, φ, θ. Значения этих углов и других заданных величин указаны в табл.К2, б (для рис. 5–9).
Определить величины, указанные в таблицах в столбцах «Найти».
Дуговые стрелки на рисунках показывают, как при построении чертежа механизма должны откладываться соответствующие углы: по ходу или против хода часовой стрелки (например, угол φ на рис. 9 –против часовой стрелки и т. д.).
Построение чертежа начинать со стержня, направление которого определяется углом альфа ; ползун с направляющими для большей наглядности изобразить так, как в примере К2 (см. рис.К2,б).
Заданную угловую скорость считать направленной против часовой стрелки, а заданную скорость VB – от точки B к b (на рис. К5–К9).
Указание. Задача К2 – на исследование плоскопараллельного движения твёрдого тела. При её решении для определения скоростей точек механизма и угловых скоростей его звеньев следует воспользоваться теоремой о проекциях скоростей двух точек тела и понятием о мгновенном центре скоростей, применяя эту теорему (или это понятие) к каждому звену механизма в отдельности.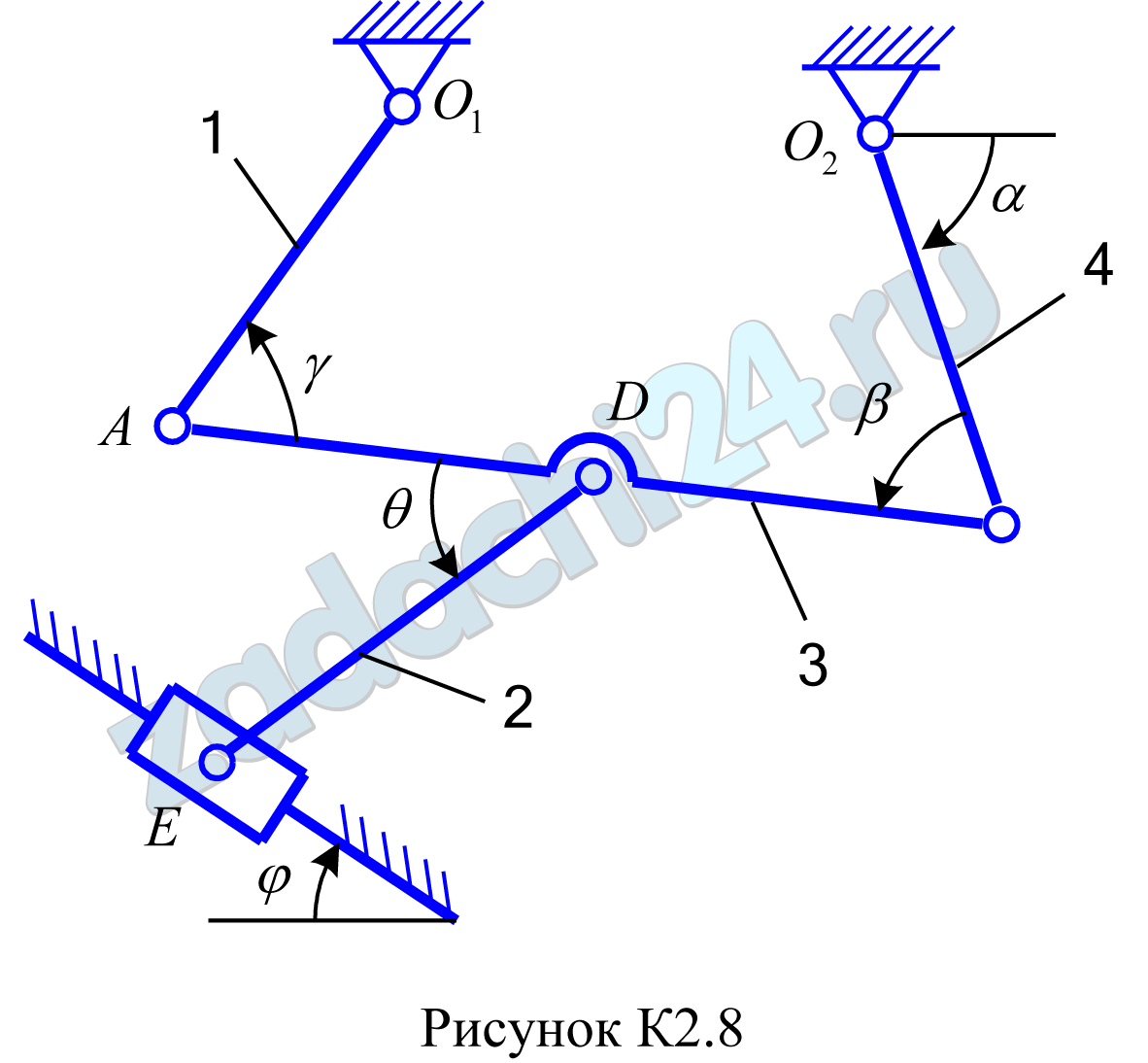
Таблица К2.б (для рис.5-9)
| Номер условия | Углы, град | ||||
| α | β | γ | φ | θ | |
| 1 | 0 | 60 | 90 | 0 | 120 |
Продолжение таблицы К2.б
| Дано | Найти | ||
| ω1, c-1 | ω4, c-1 | V точек | ω звена |
| - | 4 | А, Е | DE |

